
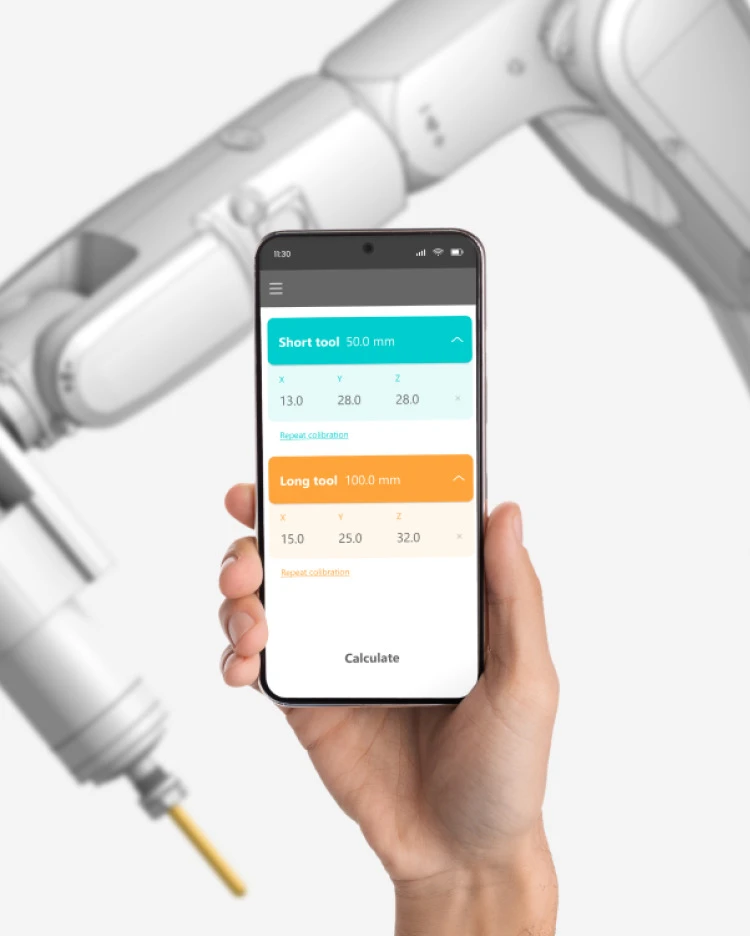
使用機器人校準移動應用程式進行 TCP 校準


機器人校准應用優勢

刀具中心點 (TCP) 的精確校準

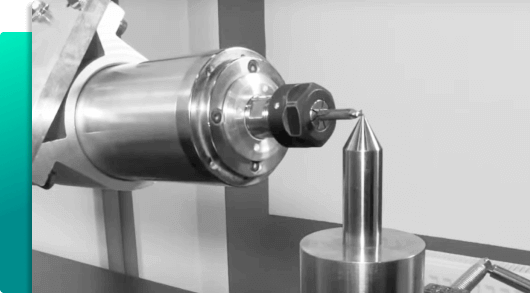
使用雙尖峰方法

自動將數據傳輸到 MachineMaker 和 SprutCAM X

消除手動數據輸入導致的錯誤

縮短機器人調試時間

無需昂貴的校準工具或服務

支援的機器人和機制清單不斷增加

工程師使用標準智慧手機與機器人進行交互
機器人校準應用程式的工作原理
第 1 步
測量長刀的位置。
工具的位置是在不同的關節角度或沿機器人路徑的不同位置測量的。

步驟 2
測量短刀位置並自動確定刀具方向。
步驟 3
使用OCR自動識別,並通過機器人校準應用程式讀取數據並計算TCP座標。
試用 SprutCAM Tech 的機器人校準行動應用程式
更多資訊
TCP校準的用途是什麼?
刀具中心點 (TCP) 校準是機器人技術中用於確定刀具相對於機器人手臂或身體的位置的過程。
這些資訊對於確保機器人運動的準確性和工具操作的精度至關重要。
TCP校準的目標是找到刀尖的確切位置,然後將其用作機器人運動控制系統的參考點。
這使得機器人能夠在正確的位置一致準確地執行切割、鑽孔和焊接等任務。
校準過程通常涉及測量工具上各個點的位置,並使用這些測量值來計算TCP的位置。


TCP校準中的雙尖峰方法是什麼?
雙尖峰法是機器人和機床應用中使用的刀具中心點 (TCP) 校準方法。
它包括測量探頭上的兩個點,並根據這些測量值計算工具中心點 (TCP) 的位置。
TCP校準的目的是確定TCP相對於機器人基本座標系的位置,以便可以準確地定位以進行加工或其他操作。
雙尖峰法是用於TCP校準的幾種方法之一,在探頭無法測量精確TCP刀具位置的情況下非常有用。
