
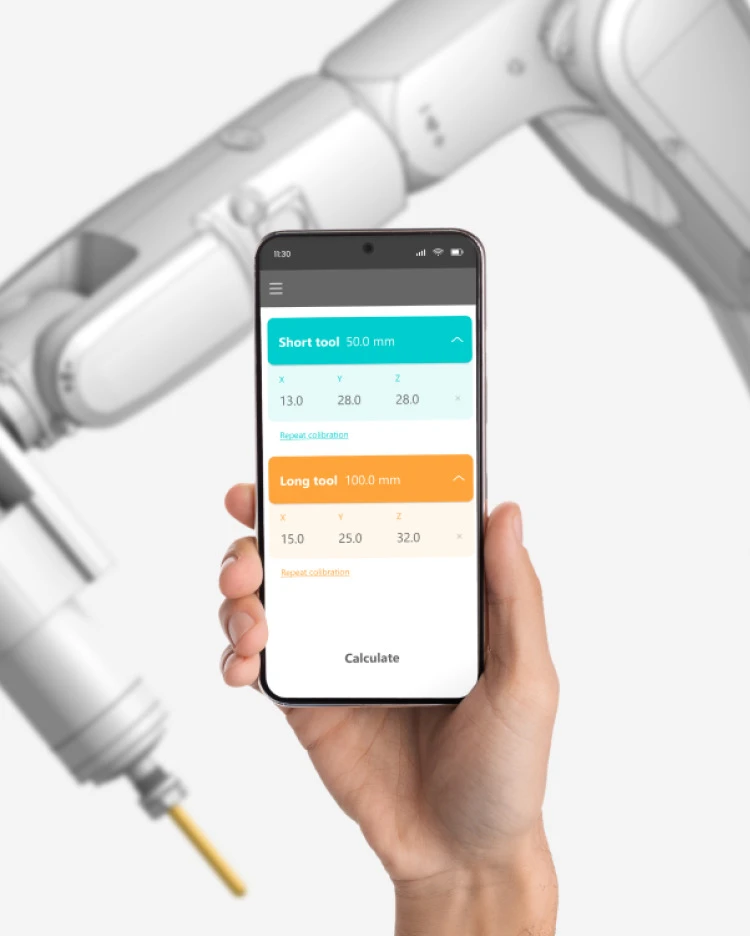
Hiệu chuẩn TCP bằng ứng dụng di động Robot Calibration


Lợi ích của ứng dụng Hiệu chỉnh Robot

Hiệu chuẩn chính xác điểm trung tâm công cụ (TCP)

Sử dụng phương pháp tăng gấp đôi

Tự động truyền dữ liệu tới MachineMaker và SprutCAM X

Loại bỏ các lỗi do nhập dữ liệu thủ công

Giảm thời gian gỡ lỗi robot

Loại bỏ các công cụ hoặc dịch vụ hiệu chuẩn tốn kém

Danh sách các robot và cơ chế được hỗ trợ ngày càng tăng

Kỹ sư tương tác với robot bằng điện thoại thông minh tiêu chuẩn
Cách ứng dụng Hiệu chỉnh Robot hoạt động
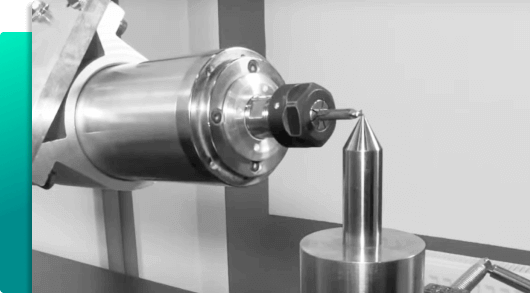
Bước 1
Đo vị trí của dụng cụ dài. Vị trí của dụng cụ được đo ở các góc khớp khác nhau hoặc tại các vị trí khác nhau dọc theo đường đi của robot.

Bước 2
Đo vị trí dao ngắn và tự động xác định hướng dao.
Bước 3
Tự động nhận dạng bằng OCR và đọc dữ liệu bằng ứng dụng Hiệu chỉnh Robot và tính toán tọa độ TCP.
Hãy dùng thử ứng dụng di động Robot Calibration của SprutCAM Tech
Tìm hiểu thêm
Hiệu chuẩn TCP được sử dụng để làm gì?
Hiệu chỉnh Điểm trung tâm công cụ (TCP) là một quy trình được sử dụng trong chế tạo robot để xác định vị trí của một công cụ so với cánh tay hoặc cơ thể của robot. Thông tin này rất quan trọng để đảm bảo tính chính xác của chuyển động của robot và độ chính xác của hoạt động công cụ của nó. Mục tiêu của việc hiệu chỉnh TCP là tìm ra vị trí chính xác của đầu dao, sau đó có thể được sử dụng làm điểm tham chiếu cho hệ thống điều khiển chuyển động của robot. Điều này cho phép robot thực hiện các nhiệm vụ như cắt, khoan và hàn một cách nhất quán và chính xác ở đúng vị trí. Quá trình hiệu chuẩn thường bao gồm việc đo vị trí của các điểm khác nhau trên dụng cụ và sử dụng các phép đo này để tính toán vị trí của TCP.


Phương pháp tăng đột biến kép trong hiệu chuẩn TCP là gì?
Phương pháp tăng đột biến kép là phương pháp hiệu chuẩn điểm trung tâm công cụ (TCP) được sử dụng trong các ứng dụng robot và máy công cụ. Nó bao gồm việc đo hai điểm trên đầu dò và tính toán vị trí của điểm trung tâm dao (TCP) dựa trên các phép đo này. Mục đích của việc hiệu chỉnh TCP là xác định vị trí của TCP so với hệ tọa độ cơ sở của robot để nó có thể được định vị chính xác cho gia công hoặc các hoạt động khác. Phương pháp tăng đột biến kép là một trong một số phương pháp được sử dụng để hiệu chỉnh TCP và có thể hữu ích trong trường hợp đầu dò không thể đo vị trí dao ở TCP chính xác.
