
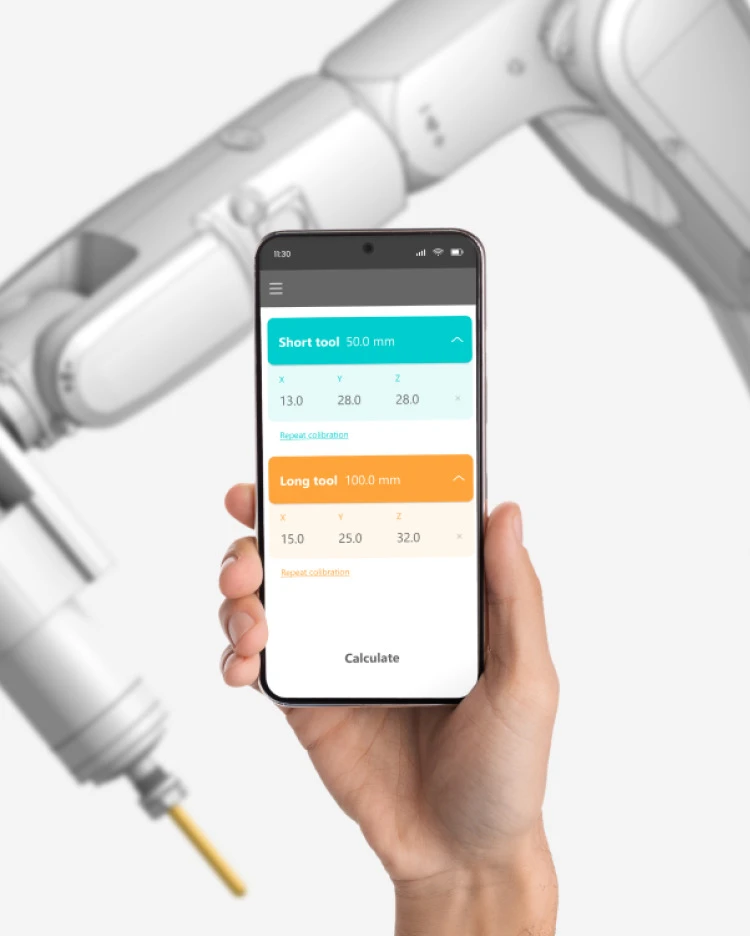
Kalibrace TCP pomocí mobilní aplikace Robot Calibration


Výhody aplikace Kalibrace robotů

Přesná kalibrace středového bodu nástroje (TCP)

Použití metody dvojitého hrotu

Automatický přenos dat do programů MachineMaker a SprutCAM X

Eliminace chyb způsobených ručním zadáváním dat

Zkrácení doby ladění robotů

Eliminace nákladných kalibračních nástrojů nebo služeb

Stále se rozšiřující seznam podporovaných robotů a mechanismů

Inženýr komunikuje s robotem pomocí běžného chytrého telefonu.
Jak aplikace Kalibrace robotů funguje
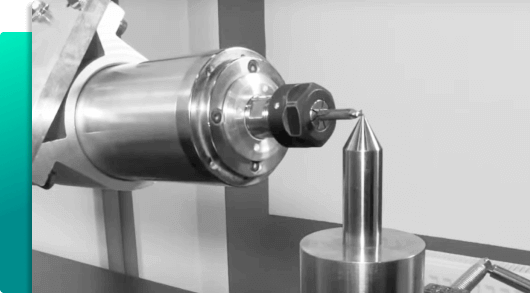
Krok 1
Měření polohy dlouhého nástroje.
Poloha nástroje se měří v různých úhlech kloubů nebo v různých polohách podél dráhy robota.

Krok 2
Měření krátké polohy nástroje a automatické určení orientace nástroje.
Krok 3
Automatické rozpoznávání pomocí OCR a čtení dat aplikací Robot Calibration a výpočet souřadnic TCP.
Vyzkoušejte mobilní aplikaci Robot Calibration od SprutCAM Tech
Dozvědět se více
K čemu slouží kalibrace TCP?
Kalibrace středového bodu nástroje (TCP) je proces používaný v robotice k určení polohy nástroje vzhledem k rameni nebo tělu robota.
Tato informace je rozhodující pro zajištění přesnosti pohybů robota a přesnosti jeho operací s nástroji.
Cílem kalibrace TCP je zjistit přesnou polohu špičky nástroje, kterou lze následně použít jako referenční bod pro systém řízení pohybu robota.
Díky tomu může robot důsledně a přesně provádět úlohy, jako je řezání, vrtání a svařování, ve správné poloze.
Proces kalibrace obvykle zahrnuje měření polohy různých bodů na nástroji a použití těchto měření k výpočtu polohy TCP.


Co je to metoda dvojitého hrotu při kalibraci TCP?
Metoda dvojitého hrotu je metoda kalibrace středového bodu nástroje (TCP) používaná v robotických a obráběcích aplikacích.
Spočívá v měření dvou bodů na sondě a výpočtu polohy středového bodu nástroje (TCP) na základě těchto měření.
Účelem kalibrace TCP je určit polohu TCP vzhledem k základnímu souřadnicovému systému robota, aby bylo možné přesně nastavit polohu pro obrábění nebo jiné operace.
Metoda dvojitého hrotu je jednou z několika metod používaných pro kalibraci TCP a může být užitečná v situacích, kdy sonda není schopna změřit polohu nástroje v přesném TCP.
