
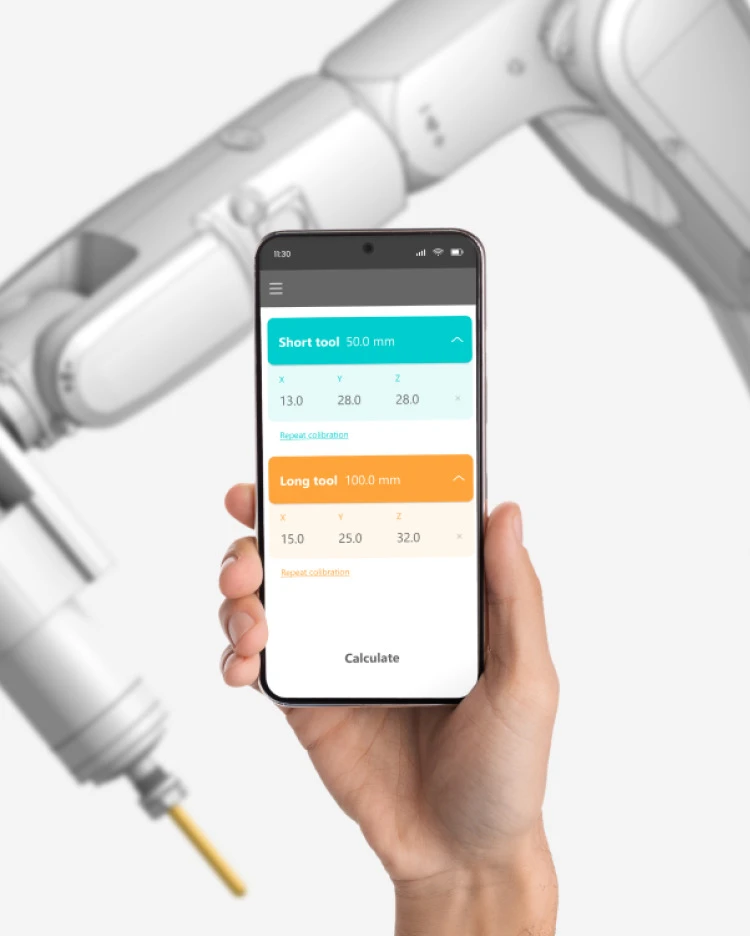
Kalibracja TCP za pomocą aplikacji mobilnej Robot Calibration


Zalety aplikacji do kalibracji robotów

Dokładna kalibracja punktu środkowego narzędzia (TCP)

Zastosowanie metody podwójnego skoku

Automatyczny transfer danych do MachineMaker i SprutCAM X

Eliminacja błędów spowodowanych ręcznym wprowadzaniem danych

Skrócony czas debugowania robota

Eliminacja kosztownych narzędzi lub usług kalibracyjnych

Stale rosnąca lista obsługiwanych robotów i mechanizmów

Inżynier wchodzi w interakcję z robotem za pomocą standardowego smartfona
Jak działa aplikacja Robot Calibration?
Krok 1
Pomiar pozycji długiego narzędzia.
Pozycja narzędzia jest mierzona pod różnymi kątami przegubu lub w różnych pozycjach wzdłuż ścieżki robota.

Krok 2
Pomiar krótkiej pozycji narzędzia i automatyczne określanie orientacji narzędzia.
Krok 3
Automatyczne rozpoznawanie za pomocą OCR i odczytywanie danych przez aplikację Robot Calibration oraz obliczanie współrzędnych TCP.
Proszę wypróbować aplikację mobilną Robot Calibration firmy SprutCAM Tech
Dowiedz się więcej
Do czego służy kalibracja TCP?
Kalibracja punktu centralnego narzędzia (TCP) to proces wykorzystywany w robotyce do określania położenia narzędzia względem ramienia lub korpusu robota.
Informacje te mają kluczowe znaczenie dla zapewnienia dokładności ruchów robota i precyzji jego operacji narzędziowych.
Celem kalibracji TCP jest znalezienie dokładnej pozycji końcówki narzędzia, która może być następnie wykorzystana jako punkt odniesienia dla systemu sterowania ruchem robota.
Dzięki temu robot może konsekwentnie i dokładnie wykonywać zadania, takie jak cięcie, wiercenie i spawanie we właściwej lokalizacji.
Proces kalibracji zazwyczaj obejmuje pomiar pozycji różnych punktów na narzędziu i wykorzystanie tych pomiarów do obliczenia pozycji TCP.


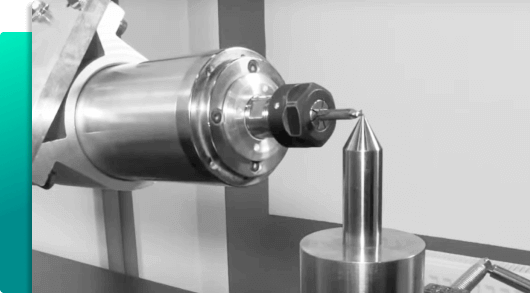
Na czym polega metoda podwójnego skoku w kalibracji TCP?
Metoda podwójnego kolca to metoda kalibracji punktu środkowego narzędzia (TCP) stosowana w robotyce i obrabiarkach.
Polega ona na pomiarze dwóch punktów na sondzie i obliczeniu położenia punktu środkowego narzędzia (TCP) na podstawie tych pomiarów.
Celem kalibracji TCP jest określenie położenia TCP w odniesieniu do bazowego układu współrzędnych robota, tak aby można go było dokładnie ustawić do obróbki lub innych operacji.
Metoda podwójnego kolca jest jedną z kilku metod stosowanych do kalibracji TCP i może być przydatna w sytuacjach, w których sonda nie jest w stanie zmierzyć pozycji narzędzia w dokładnym TCP.
