
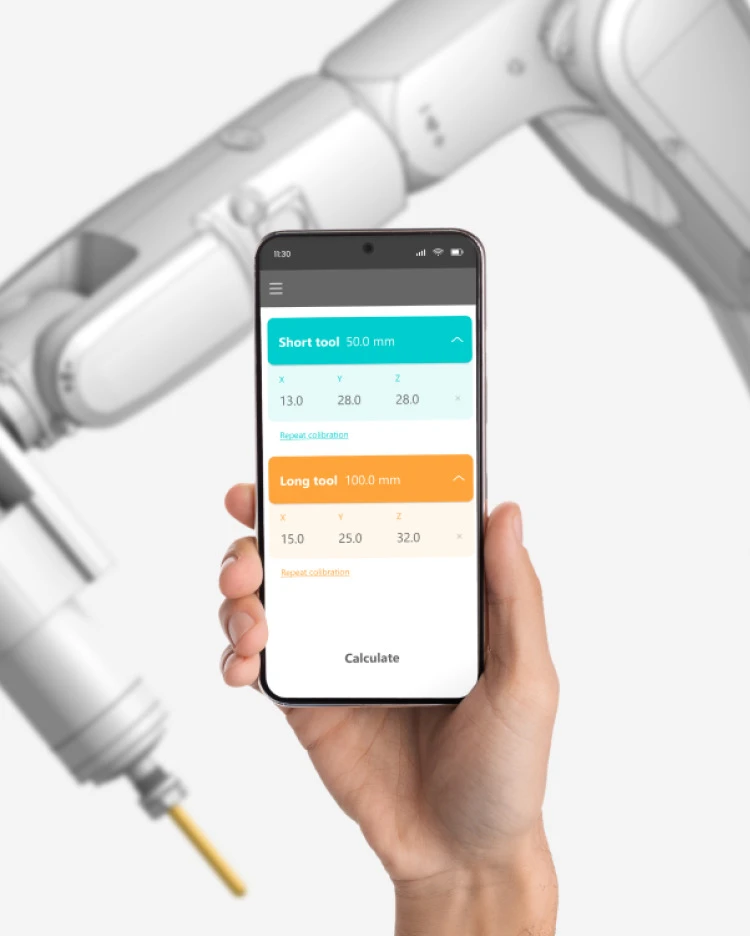
Penentukuran TCP dengan aplikasi mudah alih Robot Calibration


Faedah aplikasi Penentukuran Robot

Penentukuran tepat titik pusat alat (TCP)

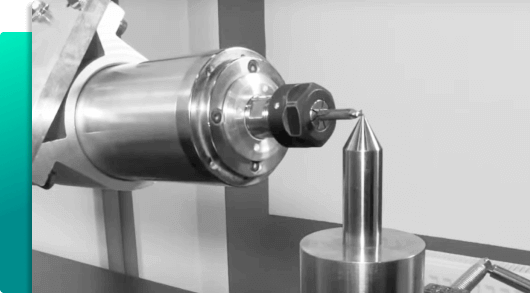
Penggunaan kaedah double-spike

Pemindahan data automatik ke MachineMaker dan SprutCAM X

Penghapusan ralat yang disebabkan oleh kemasukan data manual

Mengurangkan masa penyahpepijatan robot

Penghapusan alat atau perkhidmatan penentukuran yang mahal

Senarai robot dan mekanisme yang disokong yang sentiasa berkembang

Jurutera berinteraksi dengan robot menggunakan telefon pintar standard
Cara apl Penentukuran Robot berfungsi
Langkah 1
Pengukuran kedudukan alat panjang. Kedudukan alat diukur pada sudut sendi yang berbeza atau pada kedudukan yang berbeza di sepanjang laluan robot.

Langkah 2
Pengukuran kedudukan alat pendek dan penentuan automatik orientasi alat.
Langkah 3
Pengecaman automatik dengan OCR dan pembacaan data oleh aplikasi Penentukuran Robot dan pengiraan koordinat TCP.
Cuba aplikasi mudah alih Robot Calibration oleh SprutCAM Tech
Ketahui lebih lanjut
Apakah kegunaan penentukuran TCP?
Penentukuran Titik Pusat Alat (TCP) ialah satu proses yang digunakan dalam robotik untuk menentukan kedudukan alat berbanding lengan atau badan robot. Maklumat ini penting untuk memastikan ketepatan pergerakan robot dan ketepatan operasi alatnya. Matlamat penentukuran TCP adalah untuk mencari kedudukan tepat hujung alat, yang kemudiannya boleh digunakan sebagai titik rujukan untuk sistem kawalan gerakan robot. Ini membolehkan robot melakukan tugasan secara konsisten dan tepat seperti memotong, menggerudi dan mengimpal di lokasi yang betul. Proses penentukuran biasanya melibatkan pengukuran kedudukan pelbagai titik pada alat dan menggunakan ukuran ini untuk mengira kedudukan TCP.


Apakah kaedah double-spike dalam penentukuran TCP?
Kaedah double-spike ialah kaedah penentukuran titik pusat alat (TCP) yang digunakan dalam aplikasi alat robotik dan mesin. Ia terdiri daripada mengukur dua titik pada probe dan mengira kedudukan titik pusat alat (TCP) berdasarkan ukuran ini. Tujuan penentukuran TCP adalah untuk menentukan lokasi TCP berkenaan dengan sistem koordinat asas robot supaya ia boleh diletakkan dengan tepat untuk pemesinan atau operasi lain. Kaedah double-spike ialah salah satu daripada beberapa kaedah yang digunakan untuk penentukuran TCP dan boleh berguna dalam situasi di mana probe tidak dapat mengukur kedudukan alat pada TCP yang tepat.
