
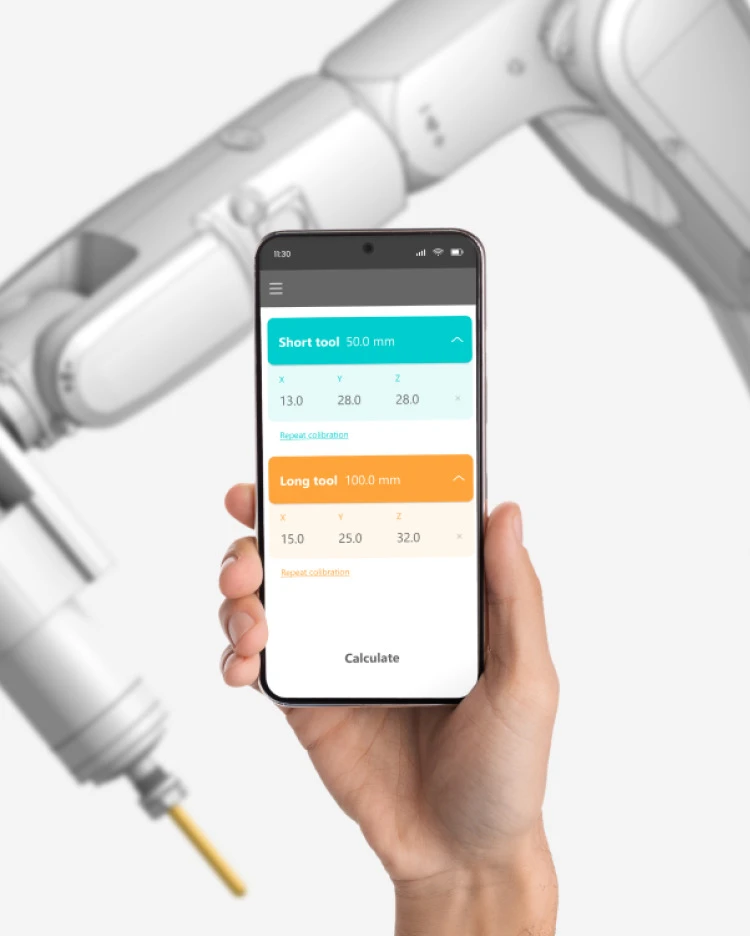
Calibrazione TCP con l’applicazione mobile Robot Calibration


Vantaggi dell’applicazione Calibrazione robot

Calibrazione accurata del punto centrale dell’utensile (TCP)

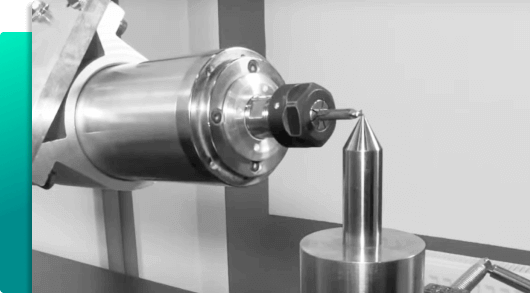
Uso del metodo a doppia punta

Trasferimento automatico di dati a MachineMaker e SprutCAM X

Eliminazione degli errori causati dall’inserimento manuale dei dati

Riduzione del tempo di debug del robot

Eliminazione di strumenti o servizi di calibrazione costosi

Elenco in continua crescita dei robot e dei meccanismi supportati

L’ingegnere interagisce con il robot utilizzando uno smartphone standard.
Come funziona l’applicazione Calibrazione robot
Passo 1
Misurazione della posizione dell’utensile lungo.
La posizione dell’utensile viene misurata a diversi angoli di articolazione o in diverse posizioni lungo il percorso del robot.

Passo 2
Misurazione della posizione dell’utensile corto e determinazione automatica dell’orientamento dell’utensile.
Passo 3
Riconoscimento automatico con OCR e lettura dei dati da parte dell’applicazione Calibrazione robot e calcolo delle coordinate TCP.
Provi l’applicazione mobile di calibrazione dei robot di SprutCAM Tech
Ulteriori informazioni
Per cosa viene utilizzata la calibrazione TCP?
La calibrazione del Punto Centrale Utensile (TCP) è un processo utilizzato nella robotica per determinare la posizione di un utensile rispetto al braccio o al corpo del robot.
Questa informazione è fondamentale per garantire l’accuratezza dei movimenti del robot e la precisione delle operazioni dell’utensile.
L’obiettivo della calibrazione TCP è trovare la posizione esatta della punta dell’utensile, che può essere utilizzata come punto di riferimento per il sistema di controllo del movimento del robot.
Ciò consente al robot di eseguire in modo costante e preciso attività come il taglio, la foratura e la saldatura nella posizione corretta.
Il processo di calibrazione comporta in genere la misurazione delle posizioni di vari punti sull’utensile e l’utilizzo di queste misurazioni per calcolare la posizione del TCP.


Che cos’è il metodo double-spike nella calibrazione TCP?
Il metodo a doppio picco è un metodo di calibrazione del punto centrale dell’utensile (TCP) utilizzato nelle applicazioni robotiche e nelle macchine utensili.
Consiste nel misurare due punti su una sonda e nel calcolare la posizione del punto centrale dell’utensile (TCP) in base a queste misurazioni.
Lo scopo della calibrazione TCP è determinare la posizione del TCP rispetto al sistema di coordinate di base del robot, in modo da poterlo posizionare con precisione per la lavorazione o altre operazioni.
Il metodo a doppia punta è uno dei diversi metodi utilizzati per la calibrazione del TCP e può essere utile nelle situazioni in cui la sonda non è in grado di misurare la posizione dell’utensile sul TCP esatto.
