
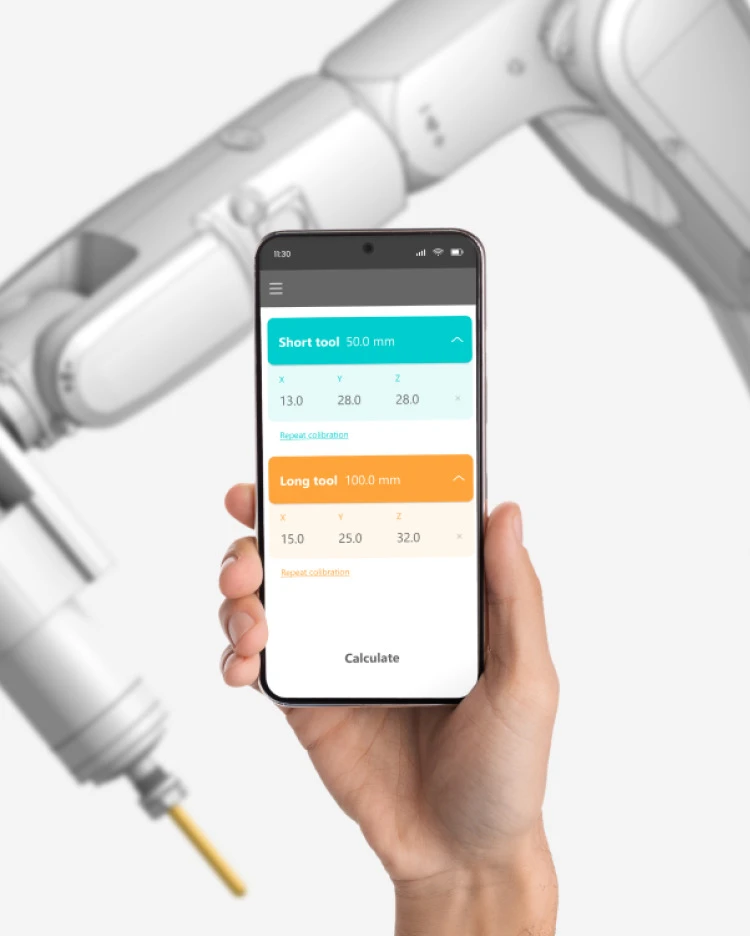
Calibrare TCP cu aplicația mobilă Robot Calibration


Beneficiile aplicației Robot Calibration

Calibrarea precisă a punctului central al sculei (TCP)

Utilizarea metodei cu două spițe

Transfer automat de date către MachineMaker și SprutCAM X

Eliminarea erorilor cauzate de introducerea manuală a datelor

Reducerea timpului de depanare a robotului

Eliminarea instrumentelor sau serviciilor de calibrare costisitoare

O listă în continuă creștere de roboți și mecanisme acceptate

Inginerul interacționează cu robotul folosind un smartphone standard
Cum funcționează aplicația Robot Calibration
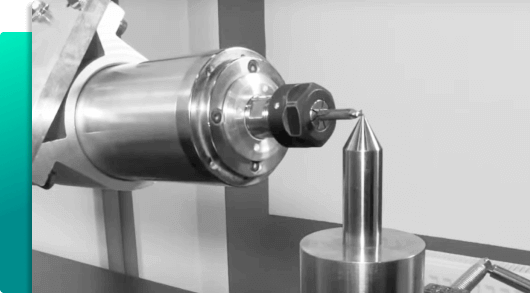
Pasul 1
Măsurarea poziției sculei lungi.
Poziția sculei se măsoară la diferite unghiuri de articulație sau în diferite poziții de-a lungul traiectoriei robotului.

Pasul 2
Măsurarea poziției scurte a sculei și determinarea automată a orientării sculei.
Pasul 3
Recunoașterea automată cu OCR și citirea datelor de către aplicația de calibrare a robotului și calcularea coordonatelor TCP.
Încercați aplicația mobilă de calibrare a roboților de SprutCAM Tech
Aflați mai multe
La ce se utilizează calibrarea TCP?
Calibrarea punctului central al sculei (TCP) este un proces utilizat în robotică pentru a determina poziția unei scule în raport cu brațul sau corpul robotului.
Aceste informații sunt esențiale pentru a asigura acuratețea mișcărilor robotului și precizia operațiilor cu scule.
Scopul calibrării TCP este de a găsi poziția exactă a vârfului sculei, care poate fi apoi utilizată ca punct de referință pentru sistemul de control al mișcării robotului.
Acest lucru permite robotului să execute în mod constant și precis sarcini precum tăierea, găurirea și sudarea în locația corectă.
Procesul de calibrare implică, de obicei, măsurarea poziției diferitelor puncte de pe sculă și utilizarea acestor măsurători pentru a calcula poziția TCP.


Ce este metoda “double-spike” în calibrarea TCP?
Metoda “double-spike” este o metodă de calibrare a punctului central al sculei (TCP) utilizată în aplicațiile robotice și ale mașinilor-unelte.
Aceasta constă în măsurarea a două puncte pe o sondă și în calcularea poziției punctului central al sculei (TCP) pe baza acestor măsurători.
Scopul calibrării TCP este de a determina poziția TCP în raport cu sistemul de coordonate de bază al robotului, astfel încât acesta să poată fi poziționat cu precizie pentru prelucrare sau alte operațiuni.
Metoda “double-spike” este una dintre cele câteva metode utilizate pentru calibrarea TCP și poate fi utilă în situațiile în care sonda nu poate măsura poziția sculei la punctul TCP exact.
