
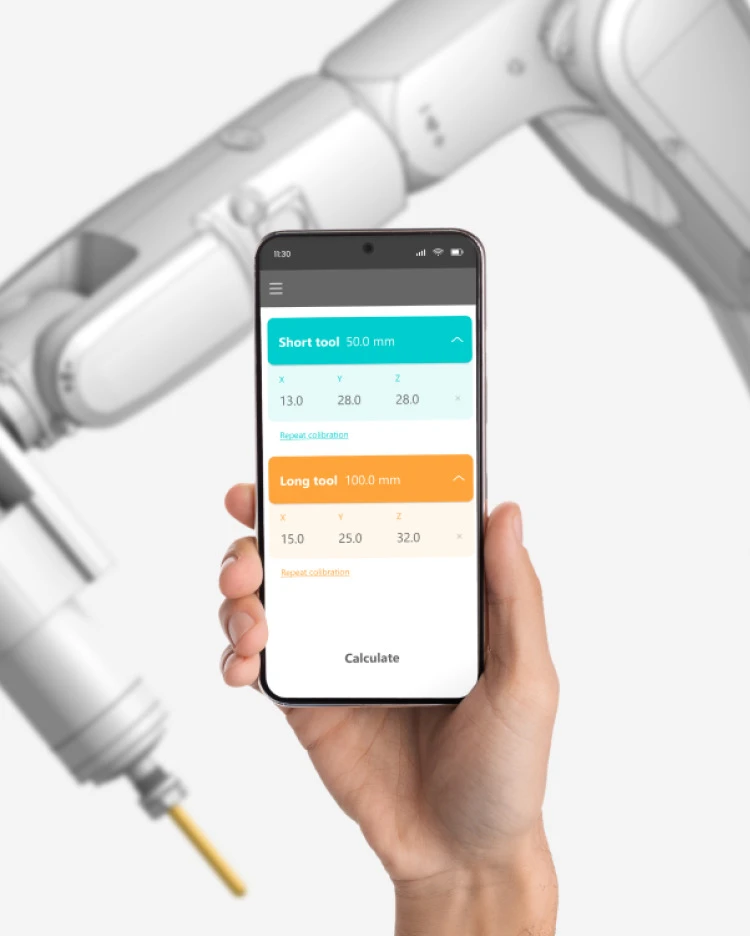
Calibración TCP con la aplicación móvil Calibración de Robots


Ventajas de la aplicación de calibración de robots

Calibración precisa del punto central de la herramienta (TCP)

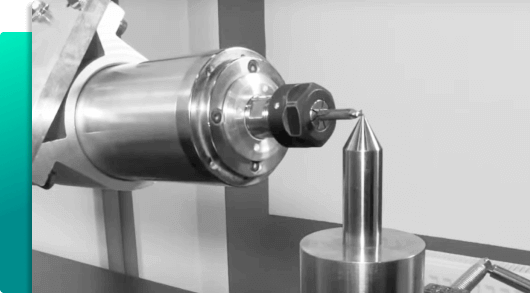
Utilización del método de doble pincho

Transferencia automática de datos a MachineMaker y SprutCAM X

Eliminación de errores causados por la introducción manual de datos

Reducción del tiempo de depuración del robot

Eliminación de costosas herramientas o servicios de calibrado

Lista cada vez mayor de robots y mecanismos compatibles

El ingeniero interactúa con el robot utilizando un smartphone estándar
Cómo funciona la aplicación de calibración de robots
Paso 1
Medición de la posición de la herramienta larga.
La posición de la herramienta se mide en diferentes ángulos de articulación o en diferentes posiciones a lo largo de la trayectoria del robot.

Paso 2
Medición de la posición corta de la herramienta y determinación automática de la orientación de la herramienta.
Paso 3
Reconocimiento automático con OCR y lectura de los datos por la aplicación de calibración del robot y cálculo de las coordenadas TCP.
Pruebe la aplicación móvil de calibración de robots de SprutCAM Tech
Saber más
¿Para qué sirve la calibración TCP?
La calibración del punto central de la herramienta (TCP) es un proceso utilizado en robótica para determinar la posición de una herramienta en relación con el brazo o el cuerpo del robot.
Esta información es fundamental para garantizar la exactitud de los movimientos del robot y la precisión de sus operaciones con la herramienta.
El objetivo de la calibración TCP es encontrar la posición exacta de la punta de la herramienta, que puede utilizarse como punto de referencia para el sistema de control de movimiento del robot.
Esto permite que el robot realice tareas como cortar, taladrar y soldar en el lugar correcto de forma constante y precisa.
El proceso de calibración suele implicar la medición de las posiciones de varios puntos de la herramienta y el uso de estas mediciones para calcular la posición del TCP.


¿Qué es el método de doble espiga en la calibración TCP?
El método de doble punta es un método de calibración del punto central de la herramienta (TCP) utilizado en aplicaciones robóticas y de máquinas herramienta.
Consiste en medir dos puntos en una sonda y calcular la posición del punto central de la herramienta (TCP) basándose en estas mediciones.
El objetivo de la calibración del TCP es determinar la ubicación del TCP con respecto al sistema de coordenadas base del robot, de modo que pueda posicionarse con precisión para el mecanizado u otras operaciones.
El método de doble punta es uno de los varios métodos utilizados para la calibración del TCP y puede ser útil en situaciones en las que la sonda no puede medir la posición de la herramienta en el TCP exacto.
