
Βαθμονόμηση TCP με την εφαρμογή Robot Calibration για κινητά


Οφέλη εφαρμογής βαθμονόμησης ρομπότ

Ακριβής βαθμονόμηση του κεντρικού σημείου του εργαλείου (TCP)

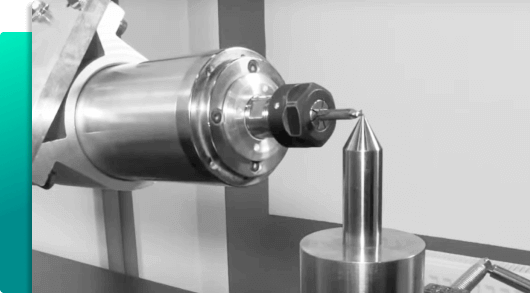
Χρήση της μεθόδου διπλής ακίδας

Αυτόματη μεταφορά δεδομένων στο MachineMaker και το SprutCAM X

Εξάλειψη των σφαλμάτων που προκαλούνται από τη χειροκίνητη καταχώρηση δεδομένων

Μειωμένος χρόνος αποσφαλμάτωσης ρομπότ

Εξάλειψη δαπανηρών εργαλείων ή υπηρεσιών βαθμονόμησης

Συνεχώς αυξανόμενος κατάλογος υποστηριζόμενων ρομπότ και μηχανισμών

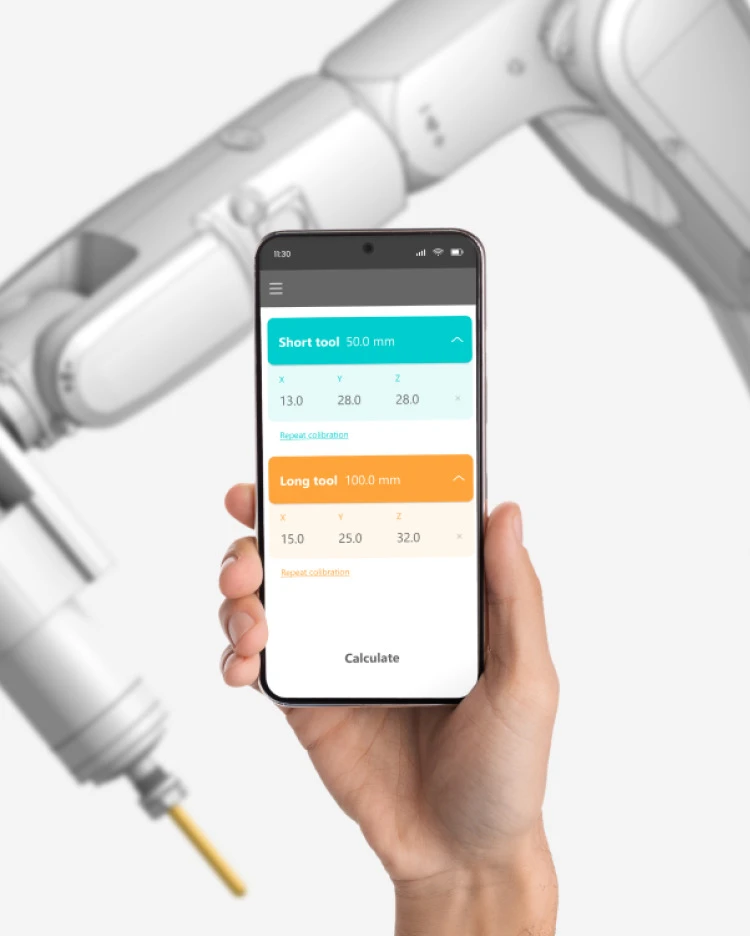
Ο μηχανικός αλληλεπιδρά με το ρομπότ χρησιμοποιώντας ένα τυπικό smartphone
Πώς λειτουργεί η εφαρμογή βαθμονόμησης ρομπότ
Βήμα 1
Μέτρηση της θέσης του μακρού εργαλείου.
Η θέση του εργαλείου μετράται σε διαφορετικές γωνίες άρθρωσης ή σε διαφορετικές θέσεις κατά μήκος της διαδρομής του ρομπότ.

Βήμα 2
Μέτρηση της μικρής θέσης του εργαλείου και αυτόματος προσδιορισμός του προσανατολισμού του εργαλείου.
Βήμα 3
Αυτόματη αναγνώριση με OCR και ανάγνωση των δεδομένων από την εφαρμογή βαθμονόμησης ρομπότ και υπολογισμός των συντεταγμένων TCP.
Δοκιμάστε την εφαρμογή Robot Calibration για κινητά από την SprutCAM Tech
Μάθετε περισσότερα
Για ποιο λόγο χρησιμοποιείται η βαθμονόμηση TCP;
Η βαθμονόμηση σημείου κέντρου εργαλείου (TCP) είναι μια διαδικασία που χρησιμοποιείται στη ρομποτική για τον προσδιορισμό της θέσης ενός εργαλείου σε σχέση με τον βραχίονα ή το σώμα του ρομπότ.
Η πληροφορία αυτή είναι κρίσιμη για τη διασφάλιση της ακρίβειας των κινήσεων του ρομπότ και της ακρίβειας των λειτουργιών του εργαλείου.
Ο στόχος της βαθμονόμησης TCP είναι να βρεθεί η ακριβής θέση του άκρου του εργαλείου, η οποία μπορεί στη συνέχεια να χρησιμοποιηθεί ως σημείο αναφοράς για το σύστημα ελέγχου κίνησης του ρομπότ.
Αυτό επιτρέπει στο ρομπότ να εκτελεί με συνέπεια και ακρίβεια εργασίες όπως κοπή, διάτρηση και συγκόλληση στη σωστή θέση.
Η διαδικασία βαθμονόμησης περιλαμβάνει συνήθως τη μέτρηση των θέσεων διαφόρων σημείων του εργαλείου και τη χρήση αυτών των μετρήσεων για τον υπολογισμό της θέσης του TCP.


Τι είναι η μέθοδος διπλής ακίδας στη βαθμονόμηση TCP;
Η μέθοδος διπλής ακίδας είναι μια μέθοδος βαθμονόμησης του κεντρικού σημείου του εργαλείου (TCP) που χρησιμοποιείται σε εφαρμογές ρομποτικής και εργαλειομηχανών.
Αποτελείται από τη μέτρηση δύο σημείων σε έναν αισθητήρα και τον υπολογισμό της θέσης του κεντρικού σημείου του εργαλείου (TCP) με βάση αυτές τις μετρήσεις.
Ο σκοπός της βαθμονόμησης TCP είναι ο προσδιορισμός της θέσης του TCP σε σχέση με το βασικό σύστημα συντεταγμένων του ρομπότ, ώστε να μπορεί να τοποθετηθεί με ακρίβεια για την κατεργασία ή άλλες εργασίες.
Η μέθοδος διπλής ακίδας είναι μία από τις διάφορες μεθόδους που χρησιμοποιούνται για τη βαθμονόμηση TCP και μπορεί να είναι χρήσιμη σε περιπτώσεις όπου ο αισθητήρας δεν είναι σε θέση να μετρήσει τη θέση του εργαλείου στο ακριβές TCP.
