
로봇 캘리브레이션 모바일 앱을 통한 TCP 캘리브레이션


로봇 캘리브레이션 앱의 이점

공구 중심점(TCP)의 정확한 보정

더블 스파이크 방법 사용

머신메이커 및 스프룻캠 X로 자동 데이터 전송

수동 데이터 입력으로 인한 오류 제거

로봇 디버깅 시간 단축

값비싼 보정 도구 또는 서비스 제거

계속 늘어나는 지원 로봇 및 메커니즘 목록

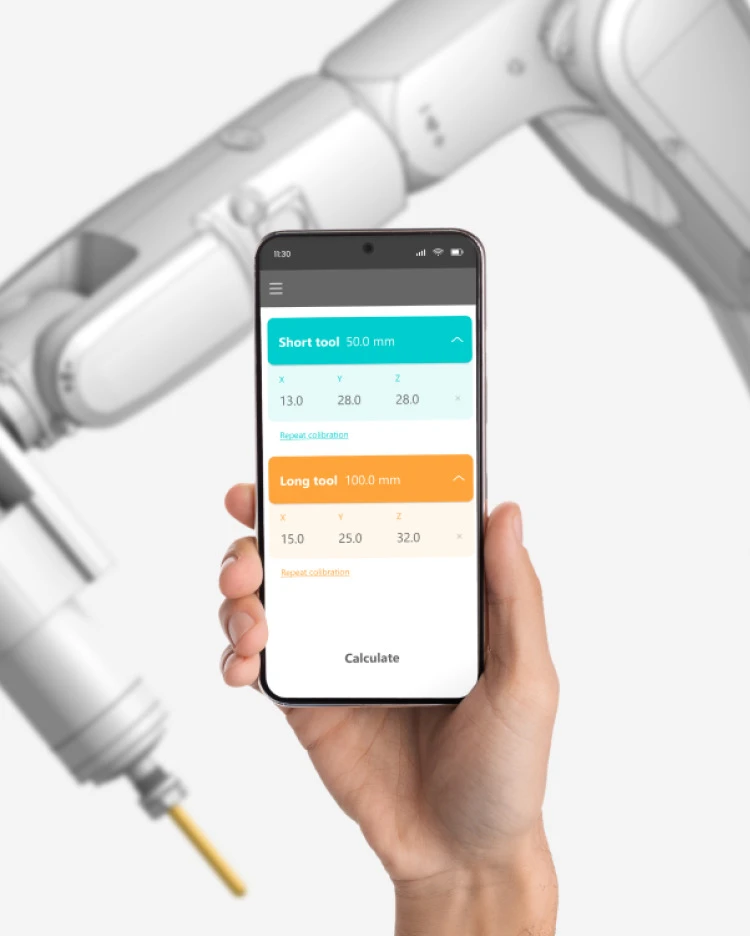
엔지니어는 표준 스마트폰을 사용하여 로봇과 상호 작용합니다.
로봇 보정 앱의 작동 방식
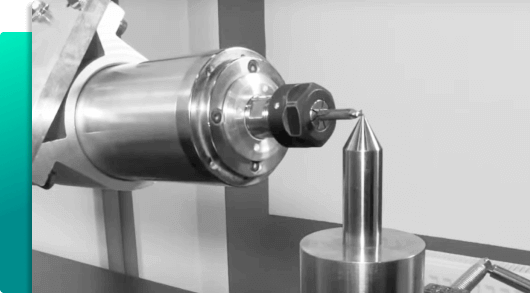
1단계
긴 공구의 위치 측정.
도구의 위치는 다른 조인트 각도 또는 로봇 경로를 따라 다른 위치에서 측정됩니다.

2단계
짧은 공구 위치를 측정하고 공구 방향을 자동으로 결정합니다.
3단계
로봇 캘리브레이션 애플리케이션을 통한 자동 인식 및 데이터 판독과 TCP 좌표 계산은 OCR을 통해 이루어집니다.
스프루트캠 테크의 로봇 캘리브레이션 모바일 앱 체험하기
자세히 알아보기
TCP 보정은 어떤 용도로 사용되나요?
도구 중심점(TCP) 보정은 로봇 공학에서 로봇의 팔 또는 몸체를 기준으로 도구의 위치를 결정하는 데 사용되는 프로세스입니다.
이 정보는 로봇의 움직임의 정확성과 도구 작동의 정밀도를 보장하는 데 매우 중요합니다.
TCP 보정의 목표는 공구 팁의 정확한 위치를 찾아 로봇의 모션 제어 시스템의 기준점으로 사용할 수 있도록 하는 것입니다.
이를 통해 로봇은 정확한 위치에서 절단, 드릴링, 용접과 같은 작업을 일관되고 정확하게 수행할 수 있습니다.
보정 프로세스에는 일반적으로 도구의 다양한 지점 위치를 측정하고 이러한 측정값을 사용하여 TCP의 위치를 계산하는 과정이 포함됩니다.


TCP 캘리브레이션에서 더블 스파이크 방식이란 무엇인가요?
더블 스파이크 방식은 로봇 및 공작 기계 애플리케이션에 사용되는 공구 중심점(TCP) 보정 방법입니다.
이 방법은 프로브에서 두 점을 측정하고 이 측정값을 기반으로 공구 중심점(TCP)의 위치를 계산하는 것으로 구성됩니다.
TCP 보정의 목적은 로봇의 기본 좌표계에 대한 TCP의 위치를 결정하여 가공 또는 기타 작업을 위해 정확하게 배치할 수 있도록 하는 것입니다.
이중 스파이크 방법은 TCP 보정에 사용되는 여러 방법 중 하나이며 프로브가 정확한 TCP에서 공구 위치를 측정할 수 없는 상황에서 유용할 수 있습니다.
