
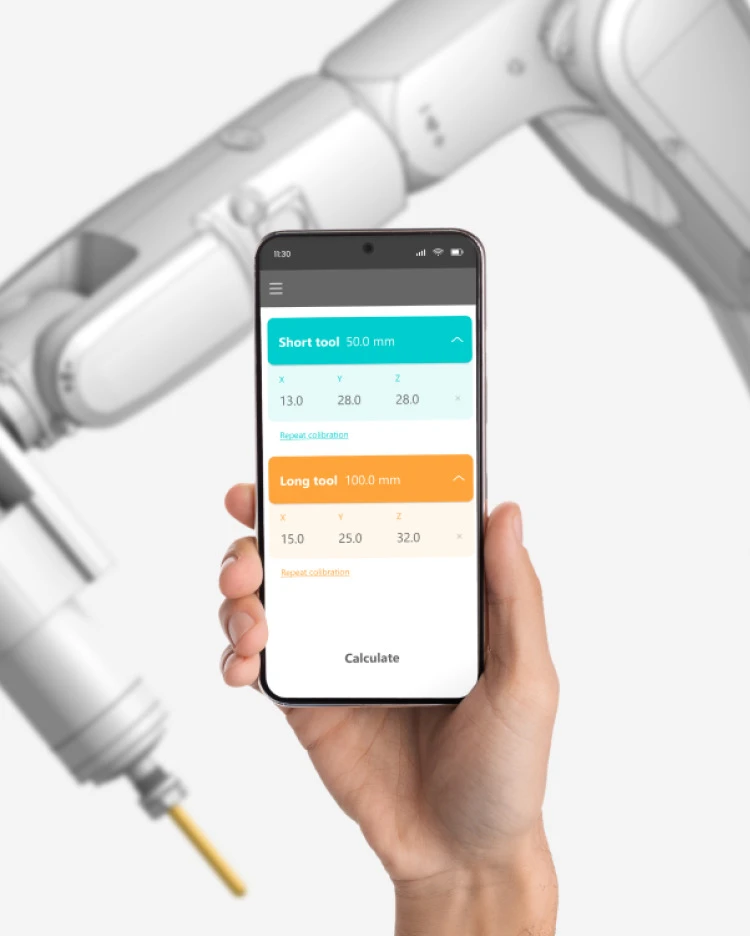
Kalibrasi TCP dengan aplikasi seluler Kalibrasi Robot


Manfaat aplikasi Kalibrasi Robot

Kalibrasi akurat dari titik pusat alat (TCP)

Penggunaan metode lonjakan ganda

Transfer data otomatis ke MachineMaker dan SprutCAM X

Penghapusan kesalahan yang disebabkan oleh entri data manual

Mengurangi waktu debugging robot

Penghapusan alat atau layanan kalibrasi yang mahal

Daftar robot dan mekanisme yang didukung yang terus bertambah

Insinyur berinteraksi dengan robot menggunakan ponsel cerdas standar
Cara kerja aplikasi Kalibrasi Robot
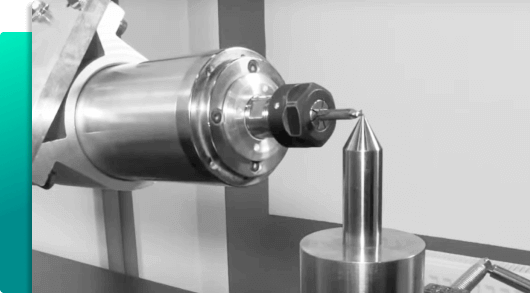
Langkah 1
Pengukuran posisi alat yang panjang.
Posisi alat diukur pada sudut sambungan yang berbeda atau pada posisi yang berbeda di sepanjang jalur robot.

Langkah 2
Pengukuran posisi pahat pendek dan penentuan otomatis orientasi pahat.
Langkah 3
Pengenalan otomatis dengan OCR dan pembacaan data oleh aplikasi Kalibrasi Robot dan perhitungan koordinat TCP.
Coba aplikasi seluler Kalibrasi Robot oleh SprutCAM Tech
Pelajari lebih lanjut
Untuk apa kalibrasi TCP digunakan?
Kalibrasi Titik Pusat Alat (TCP) adalah proses yang digunakan dalam robotika untuk menentukan posisi alat relatif terhadap lengan atau tubuh robot.
Informasi ini sangat penting untuk memastikan keakuratan gerakan robot dan ketepatan operasi alatnya.
Tujuan kalibrasi TCP adalah untuk menemukan posisi yang tepat dari ujung pahat, yang kemudian dapat digunakan sebagai titik referensi untuk sistem kontrol gerak robot.
Hal ini memungkinkan robot untuk secara konsisten dan akurat melakukan tugas-tugas seperti memotong, mengebor, dan mengelas di lokasi yang benar.
Proses kalibrasi biasanya melibatkan pengukuran posisi berbagai titik pada alat dan menggunakan pengukuran ini untuk menghitung posisi TCP.


Apa yang dimaksud dengan metode lonjakan ganda dalam kalibrasi TCP?
Metode lonjakan ganda adalah metode kalibrasi titik pusat alat (TCP) yang digunakan dalam aplikasi robotik dan alat mesin.
Metode ini terdiri dari pengukuran dua titik pada probe dan menghitung posisi titik pusat pahat (TCP) berdasarkan pengukuran ini.
Tujuan kalibrasi TCP adalah untuk menentukan lokasi TCP sehubungan dengan sistem koordinat dasar robot sehingga dapat diposisikan secara akurat untuk pemesinan atau operasi lainnya.
Metode lonjakan ganda adalah salah satu dari beberapa metode yang digunakan untuk kalibrasi TCP dan dapat berguna dalam situasi di mana probe tidak dapat mengukur posisi pahat pada TCP yang tepat.
