
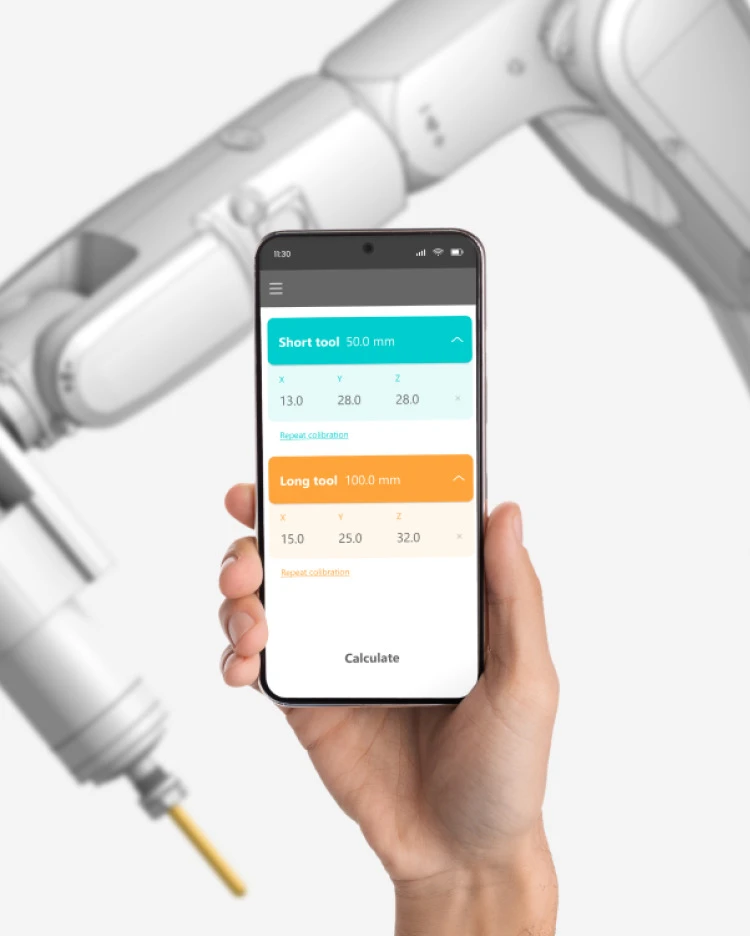
Étalonnage TCP avec l’application mobile Robot Calibration


Avantages de l’application d’étalonnage des robots

Étalonnage précis du point central de l’outil (TCP)

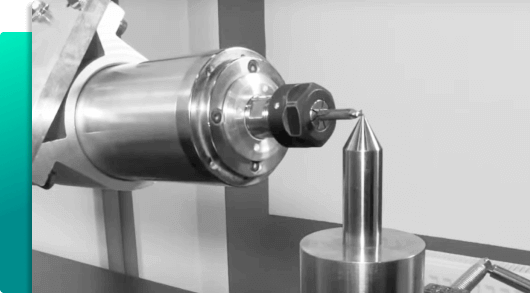
Utilisation de la méthode de la double pointe

Transfert automatique des données vers MachineMaker et SprutCAM X

Élimination des erreurs dues à la saisie manuelle des données

Réduction du temps de débogage du robot

Élimination des outils ou services d’étalonnage coûteux

La liste des robots et des mécanismes pris en charge ne cesse de s’allonger

L’ingénieur interagit avec le robot à l’aide d’un smartphone standard
Fonctionnement de l’application Robot Calibration
Étape 1
Mesure de la position de l’outil long.
La position de l’outil est mesurée à différents angles d’articulation ou à différentes positions le long de la trajectoire du robot.

Étape 2
Mesure de la position courte de l’outil et détermination automatique de l’orientation de l’outil.
Étape 3
Reconnaissance automatique par OCR et lecture des données par l’application Robot Calibration et calcul des coordonnées TCP.
Essayez l’application mobile Robot Calibration de SprutCAM Tech
En savoir plus
À quoi sert l’étalonnage TCP ?
L’étalonnage du point central de l’outil (TCP) est un processus utilisé en robotique pour déterminer la position d’un outil par rapport au bras ou au corps du robot.
Cette information est essentielle pour garantir l’exactitude des mouvements du robot et la précision des opérations effectuées avec l’outil.
L’objectif de l’étalonnage TCP est de trouver la position exacte de la pointe de l’outil, qui peut ensuite être utilisée comme point de référence pour le système de contrôle des mouvements du robot.
Cela permet au robot d’exécuter de manière cohérente et précise des tâches telles que la coupe, le perçage et le soudage au bon endroit.
Le processus d’étalonnage consiste généralement à mesurer la position de divers points sur l’outil et à utiliser ces mesures pour calculer la position du TCP.


Qu’est-ce que la méthode du double pic dans l’étalonnage du TCP ?
La méthode du double pic est une méthode d’étalonnage du point central de l’outil (TCP) utilisée dans les applications de robotique et de machines-outils.
Elle consiste à mesurer deux points sur un palpeur et à calculer la position du point central de l’outil (TCP) sur la base de ces mesures.
L’objectif de l’étalonnage du TCP est de déterminer l’emplacement du TCP par rapport au système de coordonnées de base du robot afin de pouvoir le positionner avec précision pour l’usinage ou d’autres opérations.
La méthode du double pic est l’une des méthodes utilisées pour l’étalonnage du TCP et peut être utile dans les situations où le palpeur n’est pas en mesure de mesurer la position de l’outil au TCP exact.
