
使用机器人校准移动应用程序进行 TCP 校准


机器人校准应用程序的优势

精确校准刀具中心点 (TCP)

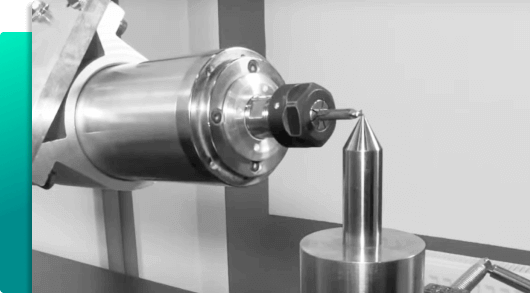
使用双钉法

自动将数据传输到 MachineMaker 和 SprutCAM X

消除手动输入数据造成的错误

缩短机器人调试时间

无需昂贵的校准工具或服务

支持的机器人和机制列表不断扩大

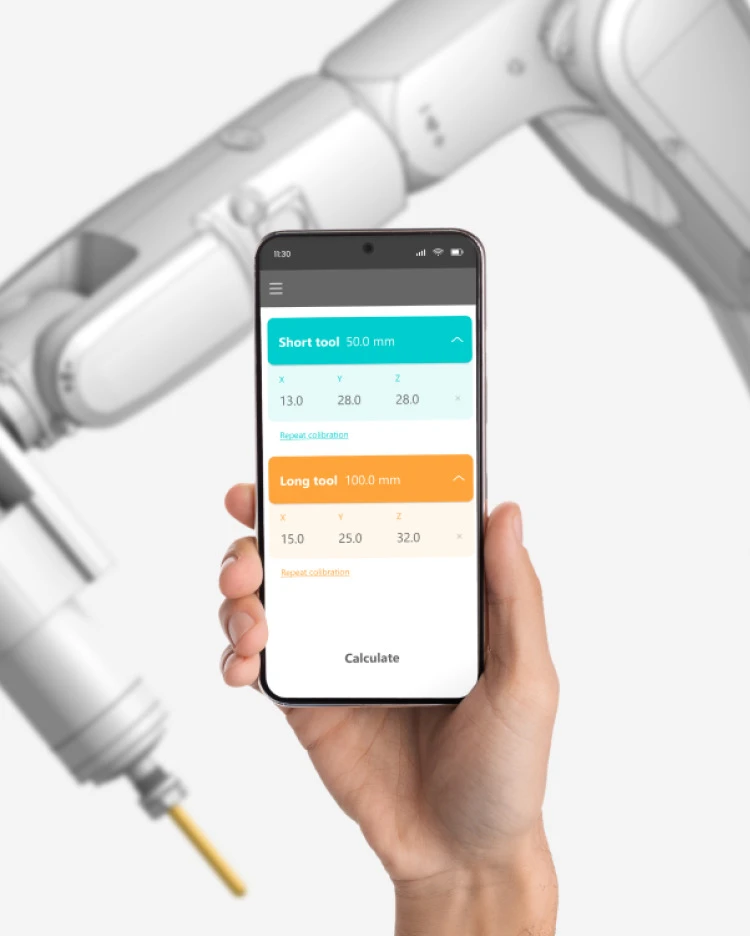
工程师使用标准智能手机与机器人互动
机器人校准应用程序的工作原理
步骤 1
测量长工具的位置。
在不同的关节角度或机器人路径的不同位置测量工具的位置。

步骤 2
测量短刀具位置并自动确定刀具方向。
步骤 3
使用 OCR 自动识别,通过机器人校准应用程序读取数据并计算 TCP 坐标。
试用 SprutCAM Tech 的机器人校准移动应用程序
了解更多
TCP 校准有什么用途?
工具中心点 (TCP) 校准是机器人技术中的一个过程,用于确定工具相对于机器人手臂或身体的位置。
这一信息对于确保机器人动作的准确性和工具操作的精确性至关重要。
TCP 校准的目标是找到工具尖端的准确位置,然后将其作为机器人运动控制系统的参考点。
这样,机器人就能在正确的位置持续、准确地执行切割、钻孔和焊接等任务。
校准过程通常包括测量工具上各点的位置,并利用这些测量结果计算出 TCP 的位置。


什么是 TCP 校准中的双尖峰法?
双钉法是一种刀具中心点 (TCP) 校准方法,用于机器人和机床应用。
它包括测量测头上的两个点,并根据这些测量结果计算刀具中心点 (TCP) 的位置。
TCP 校准的目的是确定 TCP 相对于机器人基本坐标系的位置,以便在加工或其他操作中准确定位。
双钉法是用于TCP校准的几种方法之一,在测头无法在精确的TCP处测量工具位置的情况下非常有用。
