
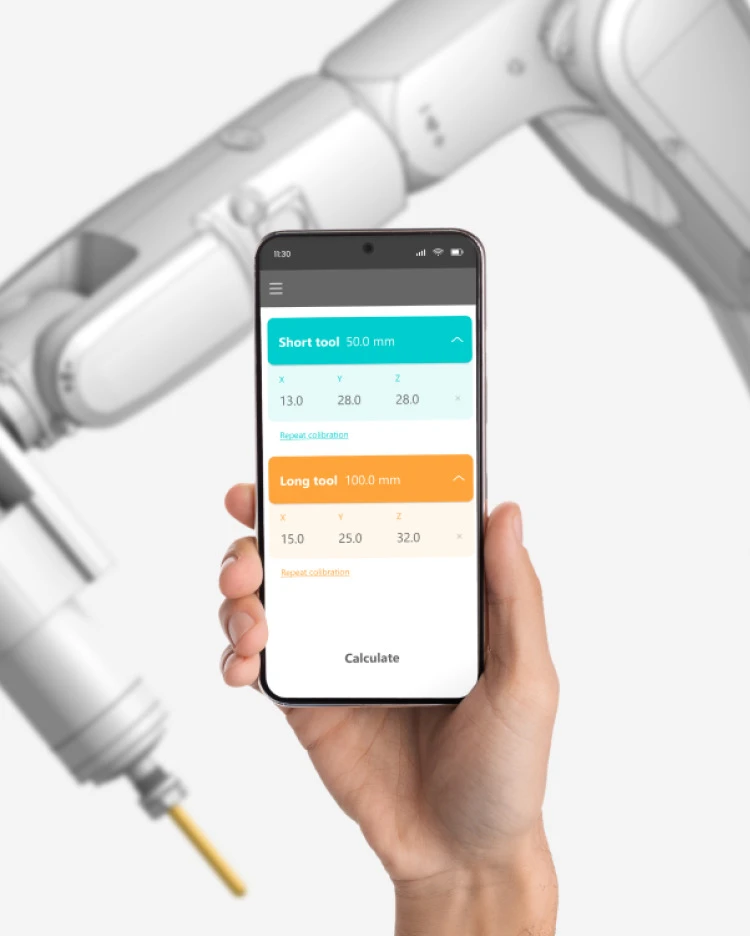
Robot Kalibrasyon mobil uygulaması ile TCP kalibrasyonu


Robot Kalibrasyonu uygulamasının avantajları

Takım merkez noktasının (TCP) hassas kalibrasyonu

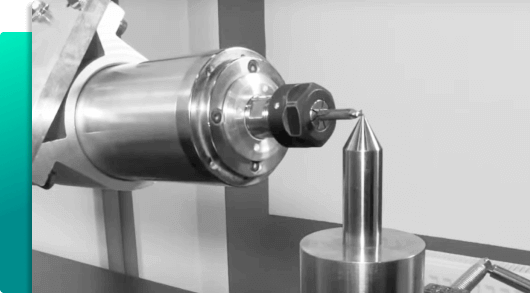
Çift sivri uç yönteminin kullanımı

MachineMaker ve SprutCAM X’e otomatik veri aktarımı

Manuel veri girişinden kaynaklanan hataların ortadan kaldırılması

Azaltılmış robot hata ayıklama süresi

Maliyetli kalibrasyon araçlarının veya hizmetlerinin ortadan kaldırılması

Sürekli büyüyen desteklenen robotlar ve mekanizmalar listesi

Mühendis standart bir akıllı telefon kullanarak robotla etkileşime girer
Robot Kalibrasyonu uygulaması nasıl çalışır?
Adım 1
Uzun aletin konumunun ölçülmesi.
Aletin konumu, farklı eklem açılarında veya robot yolu boyunca farklı konumlarda ölçülür.

Adım 2
Kısa takım pozisyonunun ölçülmesi ve takım yönünün otomatik olarak belirlenmesi.
Adım 3
OCR ile otomatik tanıma ve verilerin Robot Kalibrasyon uygulaması tarafından okunması ve TCP koordinatlarının hesaplanması.
SprutCAM Tech’in Robot Kalibrasyonu mobil uygulamasını deneyin
Daha fazla bilgi edinin
TCP kalibrasyonu ne için kullanılır?
Takım Merkez Noktası (TCP) kalibrasyonu, robotikte bir takımın robotun koluna veya gövdesine göre konumunu belirlemek için kullanılan bir işlemdir.
Bu bilgi, robotun hareketlerinin doğruluğunu ve takım işlemlerinin hassasiyetini sağlamak için kritik öneme sahiptir.
TCP kalibrasyonunun amacı, daha sonra robotun hareket kontrol sistemi için bir referans noktası olarak kullanılabilecek olan takım ucunun tam konumunu bulmaktır.
Bu, robotun doğru konumda kesme, delme ve kaynak yapma gibi görevleri tutarlı ve doğru bir şekilde gerçekleştirmesini sağlar.
Kalibrasyon işlemi tipik olarak alet üzerindeki çeşitli noktaların konumlarının ölçülmesini ve bu ölçümlerin TCP’nin konumunu hesaplamak için kullanılmasını içerir.


TCP kalibrasyonunda çift spike yöntemi nedir?
Çift sivri uç yöntemi, robotik ve takım tezgahı uygulamalarında kullanılan bir takım merkez noktası (TCP) kalibrasyon yöntemidir.
Bir prob üzerinde iki noktanın ölçülmesi ve bu ölçümlere dayalı olarak takım merkez noktasının (TCP) konumunun hesaplanmasından oluşur.
TCP kalibrasyonunun amacı, TCP’nin robotun temel koordinat sistemine göre konumunu belirlemektir, böylece işleme veya diğer işlemler için doğru bir şekilde konumlandırılabilir.
Çift sivri uç yöntemi, TCP kalibrasyonu için kullanılan çeşitli yöntemlerden biridir ve probun takım konumunu tam TCP’de ölçemediği durumlarda yararlı olabilir.
