
Calibração de TCP com o aplicativo móvel Robot Calibration


Benefícios do aplicativo Robot Calibration

Calibração precisa do ponto central da ferramenta (TCP)

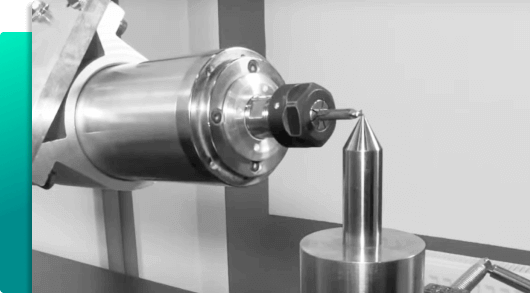
Uso do método de pico duplo

Transferência automática de dados para o MachineMaker e o SprutCAM X

Eliminação de erros causados pela entrada manual de dados

Redução do tempo de depuração do robô

Eliminação de ferramentas ou serviços de calibração caros

Lista cada vez maior de robôs e mecanismos suportados

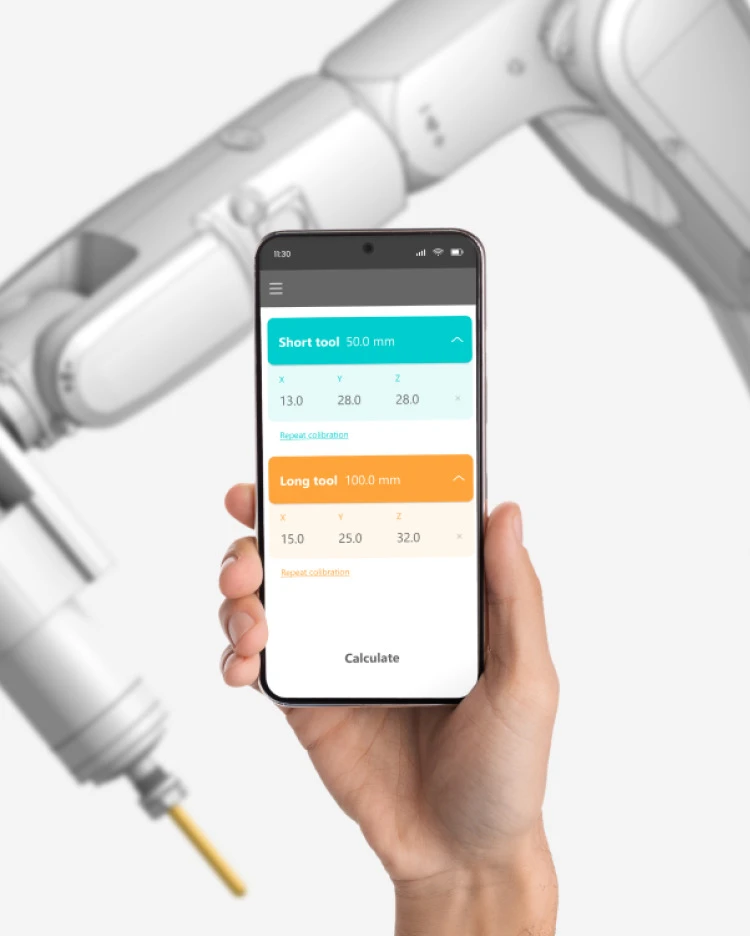
O engenheiro interage com o robô usando um smartphone padrão
Como funciona o aplicativo Calibração do Robô
Etapa 1
Medição da posição da ferramenta longa.
A posição da ferramenta é medida em diferentes ângulos de articulação ou em diferentes posições ao longo da trajetória do robô.

Etapa 2
Medição da posição da ferramenta curta e determinação automática da orientação da ferramenta.
Etapa 3
Reconhecimento automático com OCR e leitura dos dados pelo aplicativo Robot Calibration e cálculo das coordenadas TCP.
Experimente o aplicativo móvel Robot Calibration da SprutCAM Tech
Saiba Mais
Para que serve a calibração TCP?
A calibração do ponto central da ferramenta (TCP) é um processo usado na robótica para determinar a posição de uma ferramenta em relação ao braço ou ao corpo do robô.
Essas informações são essenciais para garantir a exatidão dos movimentos do robô e a precisão das operações da ferramenta.
O objetivo da calibração do TCP é encontrar a posição exata da ponta da ferramenta, que pode ser usada como ponto de referência para o sistema de controle de movimento do robô.
Isso permite que o robô execute de forma consistente e precisa tarefas como corte, perfuração e soldagem no local correto.
O processo de calibração normalmente envolve a medição das posições de vários pontos na ferramenta e o uso dessas medições para calcular a posição do TCP.


O que é o método double-spike na calibração do TCP?
O método double-spike é um método de calibração do ponto central da ferramenta (TCP) usado em aplicações robóticas e de máquinas-ferramenta.
Ele consiste em medir dois pontos em uma sonda e calcular a posição do ponto central da ferramenta (TCP) com base nessas medições.
O objetivo da calibração do TCP é determinar a localização do TCP em relação ao sistema de coordenadas da base do robô para que ele possa ser posicionado com precisão para a usinagem ou outras operações.
O método de pico duplo é um dos vários métodos usados para a calibração do TCP e pode ser útil em situações em que a sonda não consegue medir a posição da ferramenta no TCP exato.
