
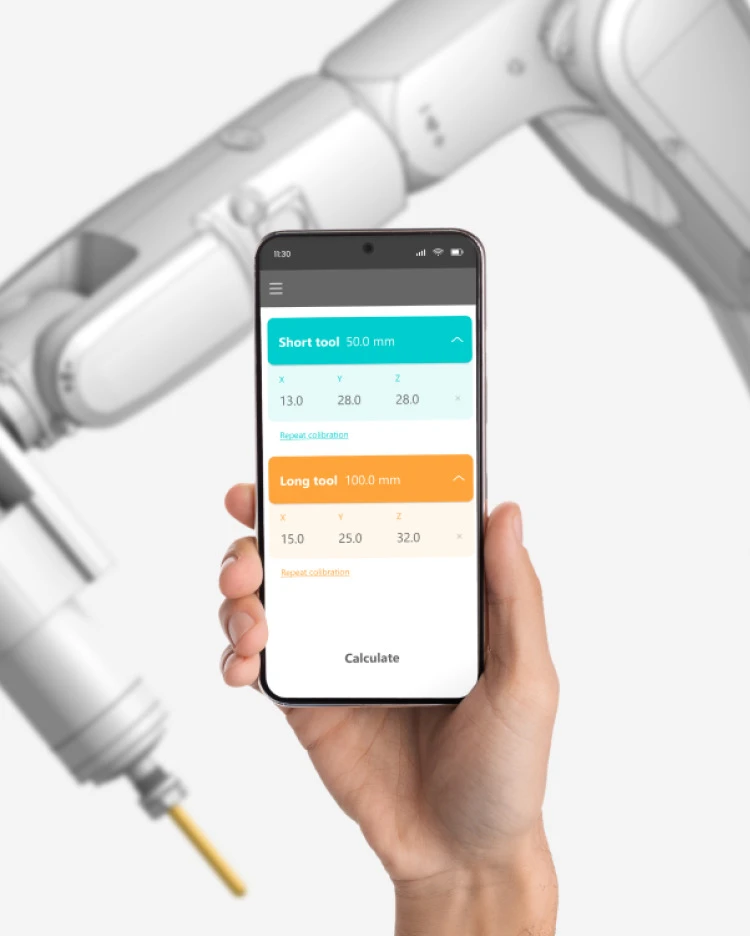
モバイルアプリ「Robot Calibration」によるTCPキャリブレーション


ロボットキャリブレーションアプリの利点

工具中心点(TCP)の正確なキャリブレーション

ダブルスパイク法の使用

MachineMakerとSprutCAM Xへの自動データ転送

手動データ入力によるエラーの排除

ロボットのデバッグ時間の短縮

高価な校正ツールやサービスの排除

対応ロボットとメカニックのリストは増え続けています。

エンジニアは標準的なスマートフォンを使ってロボットと対話します。
ロボットキャリブレーションアプリの仕組み
ステップ1
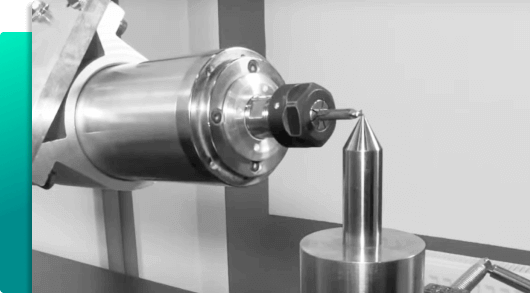
長いツールの位置の測定。
ツールの位置は、異なる関節角度またはロボット経路に沿った異なる位置で測定されます。

ステップ2
短い工具位置の測定と工具姿勢の自動決定。
ステップ3
OCRによる自動認識、ロボットキャリブレーションアプリケーションによるデータの読み取り、TCP座標の計算。
SprutCAM Techのロボットキャリブレーションモバイルアプリをお試しください。
さらに詳しく
TCPキャリブレーションは何に使用されるのですか?
ツール中心点(TCP)キャリブレーションは、ロボットのアームやボディに対するツールの位置を決定するためにロボット工学で使用されるプロセスです。
この情報は、ロボットの動作の正確さとツール操作の精度を確保するために非常に重要です。
TCPキャリブレーションの目的は、ツール先端の正確な位置を見つけることであり、これをロボットの動作制御システムの基準点として使用することができます。
これにより、ロボットは切断、穴あけ、溶接などの作業を正しい位置で一貫して正確に行うことができます。
較正プロセスでは通常、ツール上のさまざまな点の位置を測定し、その測定値を使用してTCPの位置を計算します。


TCPキャリブレーションにおけるダブルスパイク法とは何ですか?
ダブルスパイク法は、ロボットや工作機械のアプリケーションで使用される工具中心点(TCP)のキャリブレーション方法です。
プローブ上の2点を測定し、その測定値に基づいてツールセンターポイント(TCP)の位置を計算します。
TCP較正の目的は、ロボットのベース座標系に対するTCPの位置を決定することで、機械加工やその他の作業で正確な位置決めができるようにすることです。
ダブルスパイク方式は、TCPキャリブレーションに使用されるいくつかの方式の1つで、プローブが正確なTCPのツール位置を測定できない場合に役立ちます。
