
TCP kalibrálás a Robot Calibration mobilalkalmazással


Robot kalibrációs alkalmazás előnyei

A szerszám középpontjának pontos kalibrálása (TCP)

A dupla tüskés módszer alkalmazása

Automatikus adatátvitel a MachineMaker és a SprutCAM X felé

A kézi adatbevitel okozta hibák kiküszöbölése

Csökkentett robot hibakeresési idő

Költséges kalibráló eszközök vagy szolgáltatások kiküszöbölése

A támogatott robotok és mechanizmusok folyamatosan bővülő listája

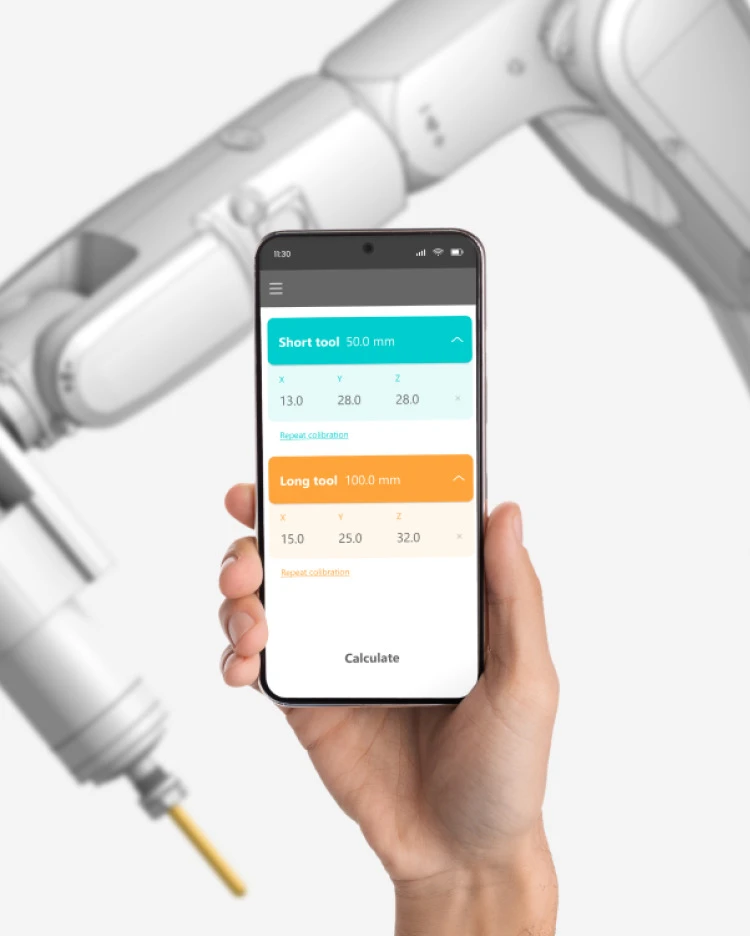
A mérnök egy hagyományos okostelefon segítségével lép kapcsolatba a robottal.
Hogyan működik a robotkalibráló alkalmazás
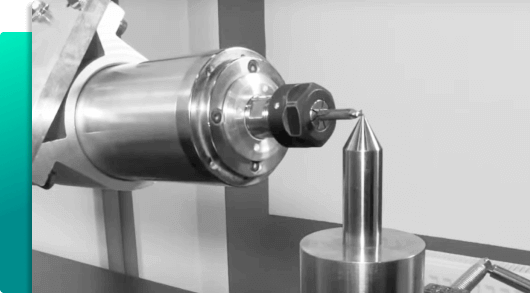
1. lépés
A hosszú szerszám helyzetének mérése.
A szerszám helyzetének mérése különböző csuklószögeknél vagy a robotpálya különböző pozícióiban történik.

2. lépés
A rövid szerszám pozíciójának mérése és a szerszám tájolásának automatikus meghatározása.
3. lépés
Automatikus felismerés OCR segítségével és az adatok beolvasása a Robot Calibration alkalmazással, valamint a TCP koordináták kiszámítása.
Próbálja ki a SprutCAM Tech robotkalibrációs mobilalkalmazását
Tudjon meg többet
Mire használják a TCP-kalibrálást?
A szerszámközéppont (TCP) kalibrálás a robotikában alkalmazott eljárás, amely a szerszám helyzetét határozza meg a robot karjához vagy testéhez képest.
Ez az információ kritikus fontosságú a robot mozgásának pontossága és a szerszámműveletek precizitása szempontjából.
A TCP-kalibrálás célja a szerszámhegy pontos helyzetének meghatározása, amely aztán referenciapontként használható a robot mozgásvezérlő rendszere számára.
Ez lehetővé teszi, hogy a robot következetesen és pontosan a megfelelő helyen végezze el az olyan feladatokat, mint a vágás, fúrás és hegesztés.
A kalibrálási folyamat jellemzően a szerszám különböző pontjainak helyzetének mérését és e mérések felhasználását jelenti a TCP helyzetének kiszámításához.


Mi az a dupla tüskés módszer a TCP-kalibrálásban?
A dupla tüskés módszer a szerszámközéppont (TCP) kalibrálási módszere, amelyet robotikai és szerszámgépes alkalmazásokban használnak.
A módszer lényege, hogy két pontot mérünk egy szondán, és e mérések alapján kiszámítjuk a szerszámközéppont (TCP) helyzetét.
A TCP-kalibrálás célja a TCP helyének meghatározása a robot alapkoordinátarendszeréhez képest, hogy a robot pontosan pozicionálható legyen a megmunkáláshoz vagy más műveletekhez.
A dupla tüskés módszer egyike a TCP kalibrálására használt számos módszernek, és hasznos lehet olyan helyzetekben, amikor a szonda nem képes a szerszám helyzetét a pontos TCP-nél mérni.
