
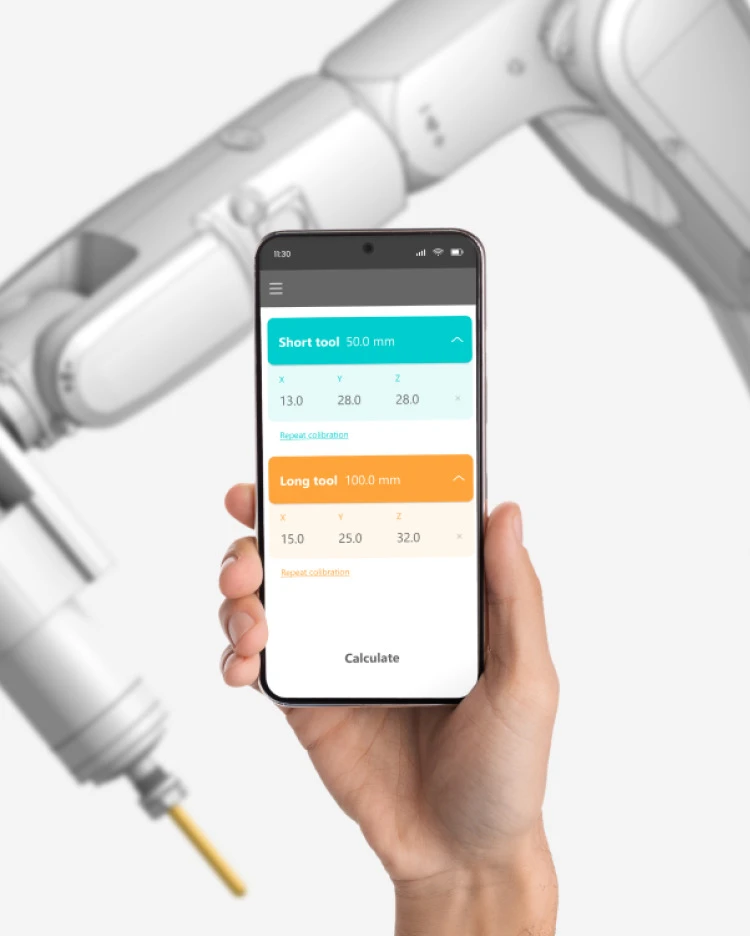
TCP-Kalibrierung mit der mobilen App Robot Calibration


Vorteile der App Roboterkalibrierung

Genaue Kalibrierung des Werkzeugmittelpunkts (TCP)

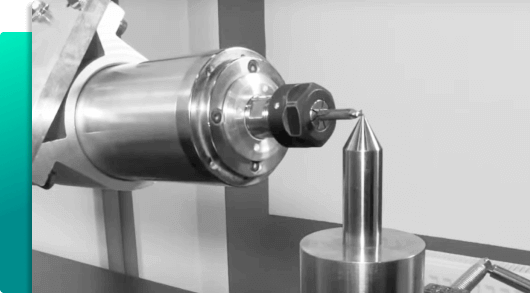
Anwendung der Double-Spike-Methode

Automatische Datenübertragung zu MachineMaker und SprutCAM X

Beseitigung von Fehlern, die durch manuelle Dateneingabe entstehen

Reduzierte Zeit für die Roboter-Fehlersuche

Eliminierung von kostspieligen Kalibrierungswerkzeugen oder -dienstleistungen

Ständig wachsende Liste von unterstützten Robotern und Mechanismen

Der Ingenieur interagiert mit dem Roboter über ein Standard-Smartphone
So funktioniert die App Roboter-Kalibrierung
Schritt 1
Messung der Position des langen Werkzeugs.
Die Position des Werkzeugs wird in verschiedenen Gelenkwinkeln oder an verschiedenen Positionen entlang der Roboterbahn gemessen.

Schritt 2
Messung der kurzen Werkzeugposition und automatische Bestimmung der Werkzeugausrichtung.
Schritt 3
Automatische Erkennung mit OCR und Einlesen der Daten durch die Anwendung Robot Calibration und Berechnung der TCP-Koordinaten.
Testen Sie die mobile App Roboterkalibrierung von SprutCAM Tech
Mehr erfahren
Wozu dient die TCP-Kalibrierung?
Die Kalibrierung des Werkzeugmittelpunkts (TCP) ist ein Prozess, der in der Robotik verwendet wird, um die Position eines Werkzeugs im Verhältnis zum Arm oder Körper des Roboters zu bestimmen.
Diese Information ist entscheidend für die Genauigkeit der Bewegungen des Roboters und die Präzision der Werkzeugoperationen.
Ziel der TCP-Kalibrierung ist es, die exakte Position der Werkzeugspitze zu ermitteln, die dann als Referenzpunkt für das Bewegungssteuerungssystem des Roboters verwendet werden kann.
Dadurch kann der Roboter Aufgaben wie Schneiden, Bohren und Schweißen konsistent und präzise an der richtigen Stelle ausführen.
Der Kalibrierungsprozess umfasst in der Regel die Messung der Positionen verschiedener Punkte am Werkzeug und die Verwendung dieser Messungen zur Berechnung der Position des TCP.


Was ist die Doppelspitzenmethode bei der TCP-Kalibrierung?
Die Double-Spike-Methode ist eine Methode zur Kalibrierung des Werkzeugmittelpunkts (TCP), die in Roboter- und Werkzeugmaschinenanwendungen eingesetzt wird.
Sie besteht aus der Messung von zwei Punkten auf einem Messtaster und der Berechnung der Position des Werkzeugmittelpunkts (TCP) auf der Grundlage dieser Messungen.
Der Zweck der TCP-Kalibrierung besteht darin, die Position des TCP in Bezug auf das Basiskoordinatensystem des Roboters zu bestimmen, damit dieser für die Bearbeitung oder andere Operationen genau positioniert werden kann.
Die Double-Spike-Methode ist eine von mehreren Methoden zur TCP-Kalibrierung und kann in Situationen nützlich sein, in denen der Messtaster nicht in der Lage ist, die Werkzeugposition am exakten TCP zu messen.
