
रोबोट कैलिब्रेशन मोबाइल ऐप के साथ टीसीपी कैलिब्रेशन


रोबोट कैलिब्रेशन ऐप के लाभ

उपकरण केंद्र बिंदु (टीसीपी) का सटीक अंशांकन

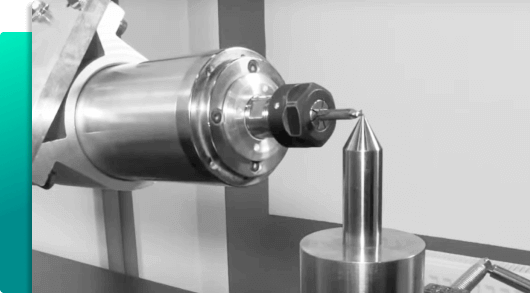
डबल-स्पाइक विधि का उपयोग

मशीनमेकर और स्प्रूटकैम एक्स में स्वचालित डेटा स्थानांतरण

मैन्युअल डेटा प्रविष्टि के कारण होने वाली त्रुटियों का उन्मूलन

रोबोट डिबगिंग समय में कमी

महंगे अंशांकन उपकरणों या सेवाओं का उन्मूलन

समर्थित रोबोटों और तंत्रों की लगातार बढ़ती सूची

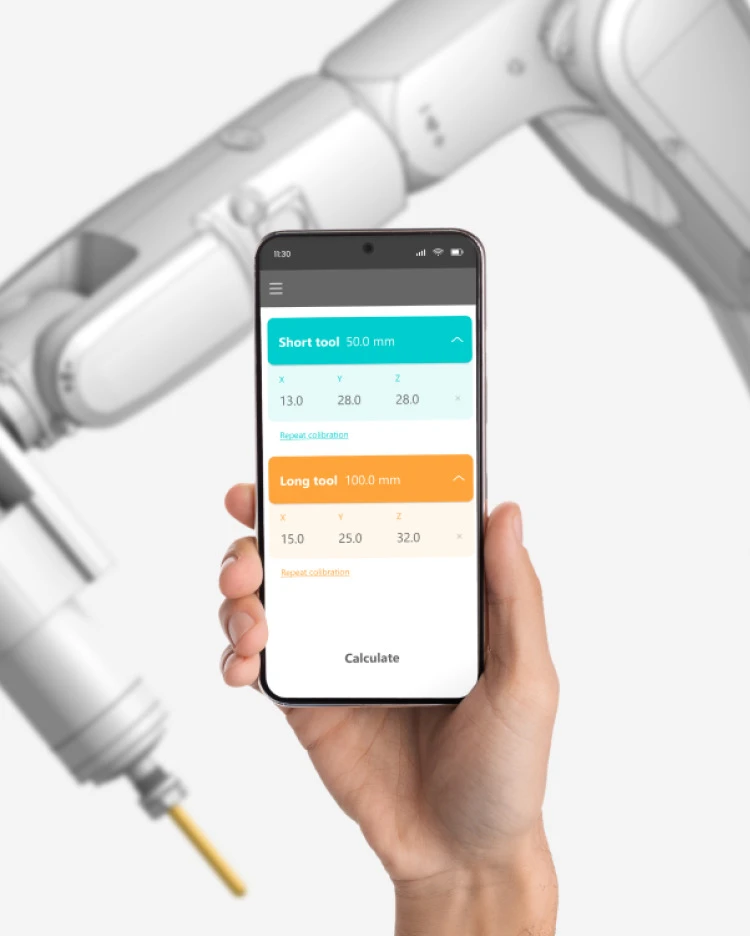
इंजीनियर एक मानक स्मार्टफोन का उपयोग करके रोबोट के साथ बातचीत करता है
रोबोट कैलिब्रेशन ऐप कैसे काम करता है
स्टेप 1
लंबे उपकरण की स्थिति का मापन। उपकरण की स्थिति को विभिन्न संयुक्त कोणों पर या रोबोट पथ के साथ विभिन्न स्थितियों पर मापा जाता है।

चरण दो
लघु उपकरण स्थिति का मापन और उपकरण अभिविन्यास का स्वचालित निर्धारण।
चरण 3
ओसीआर के साथ स्वचालित पहचान और रोबोट कैलिब्रेशन अनुप्रयोग द्वारा डेटा को पढ़ना और टीसीपी निर्देशांक की गणना।
SprutCAM Tech द्वारा रोबोट कैलिब्रेशन मोबाइल ऐप आज़माएं
और अधिक जानें
टीसीपी अंशांकन का उपयोग किस लिए किया जाता है?
टूल सेंटर पॉइंट (TCP) कैलिब्रेशन रोबोटिक्स में इस्तेमाल की जाने वाली एक प्रक्रिया है, जिसका उद्देश्य रोबोट के हाथ या शरीर के सापेक्ष टूल की स्थिति निर्धारित करना है। यह जानकारी रोबोट की हरकतों की सटीकता और उसके टूल संचालन की सटीकता सुनिश्चित करने के लिए महत्वपूर्ण है। TCP कैलिब्रेशन का लक्ष्य टूल टिप की सटीक स्थिति का पता लगाना है, जिसे फिर रोबोट की गति नियंत्रण प्रणाली के लिए संदर्भ बिंदु के रूप में इस्तेमाल किया जा सकता है। यह रोबोट को सही स्थान पर कटिंग, ड्रिलिंग और वेल्डिंग जैसे कार्यों को लगातार और सटीक रूप से करने की अनुमति देता है। कैलिब्रेशन प्रक्रिया में आमतौर पर टूल पर विभिन्न बिंदुओं की स्थिति को मापना और इन मापों का उपयोग करके TCP की स्थिति की गणना करना शामिल होता है।


टीसीपी अंशांकन में डबल-स्पाइक विधि क्या है?
डबल-स्पाइक विधि एक उपकरण केंद्र बिंदु (TCP) अंशांकन विधि है जिसका उपयोग रोबोटिक और मशीन टूल अनुप्रयोगों में किया जाता है। इसमें एक जांच पर दो बिंदुओं को मापना और इन मापों के आधार पर उपकरण केंद्र बिंदु (TCP) की स्थिति की गणना करना शामिल है। TCP अंशांकन का उद्देश्य रोबोट के आधार समन्वय प्रणाली के संबंध में TCP का स्थान निर्धारित करना है ताकि इसे मशीनिंग या अन्य संचालन के लिए सटीक रूप से रखा जा सके। डबल-स्पाइक विधि TCP अंशांकन के लिए उपयोग की जाने वाली कई विधियों में से एक है और उन स्थितियों में उपयोगी हो सकती है जहां जांच सटीक TCP पर उपकरण की स्थिति को मापने में असमर्थ है।
