MeetSprutCAM X Robot
")
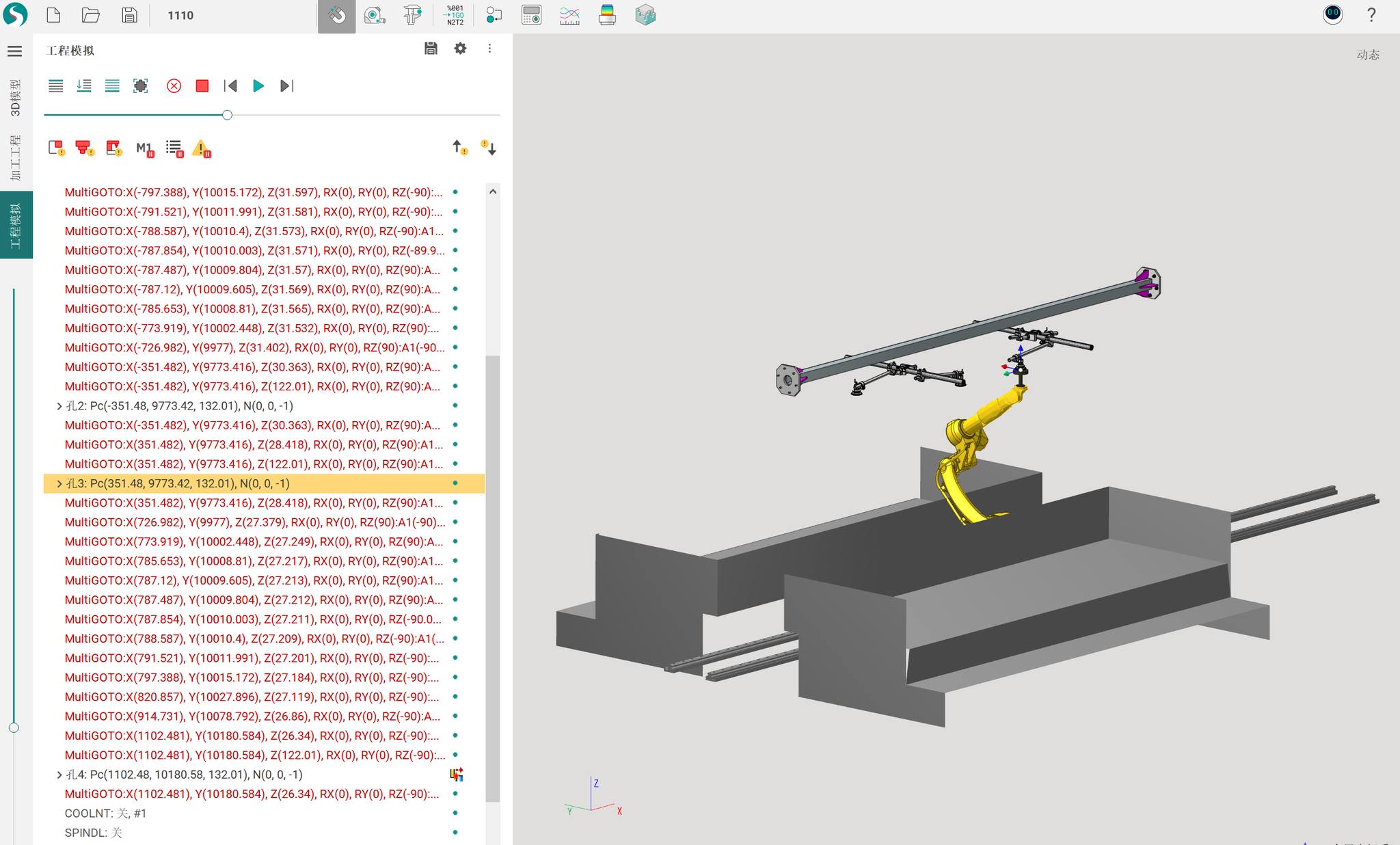
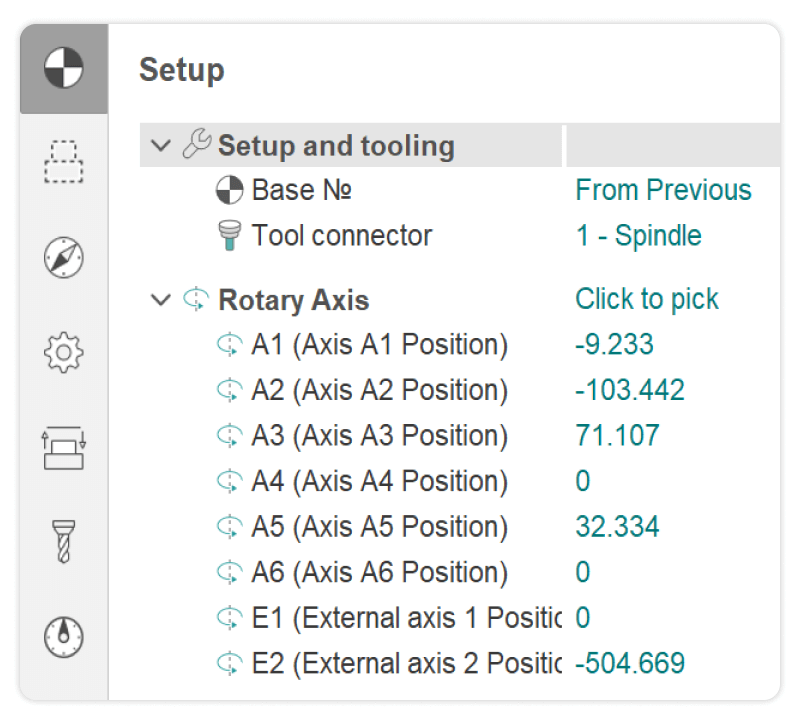 Inspector is the place there all the technology parameters are defined: job zone, toolpath strategy, tolerance, interpolation, approach and retract, links, feeds and speeds, toolpath transformation etc
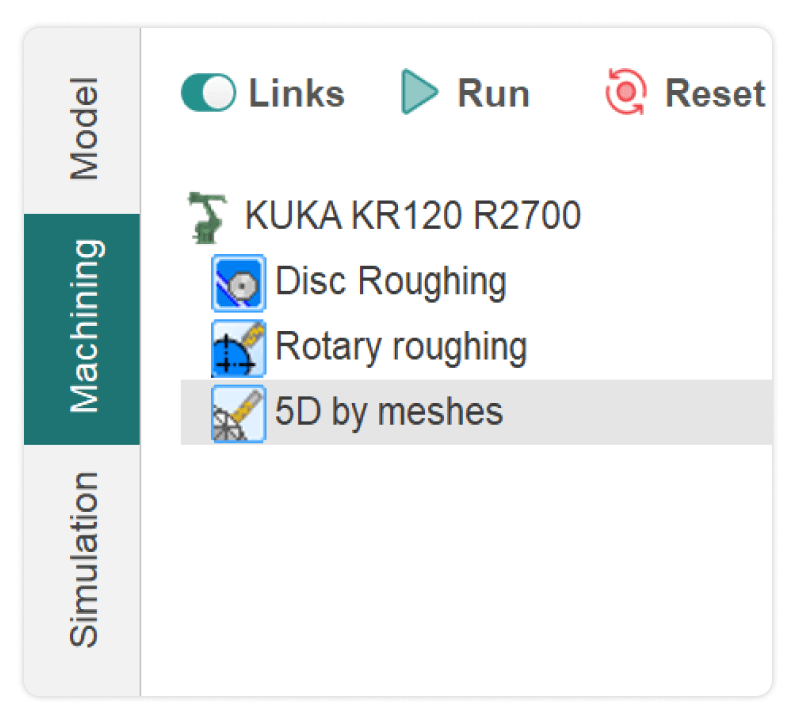
Inspector is the place there all the technology parameters are defined: job zone, toolpath strategy, tolerance, interpolation, approach and retract, links, feeds and speeds, toolpath transformation etc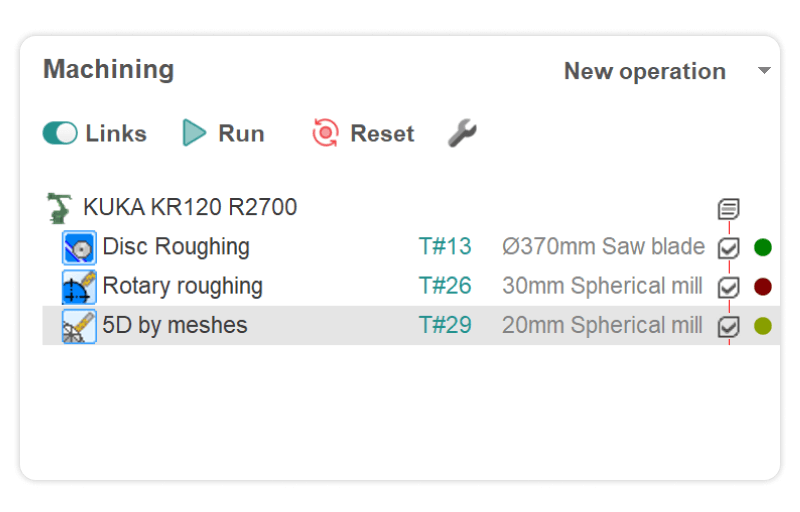 Machining operations sequence
Machining operations sequence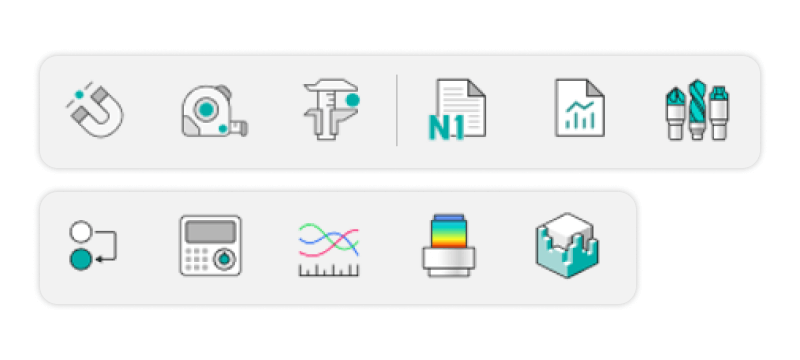 Useful tools for everyday work: virtual machine pendant, tape measure, postprocessor, machining report, tool management, verify and compare tool, tool reach inspector, axes graph and 3d model transformation tools.
Useful tools for everyday work: virtual machine pendant, tape measure, postprocessor, machining report, tool management, verify and compare tool, tool reach inspector, axes graph and 3d model transformation tools.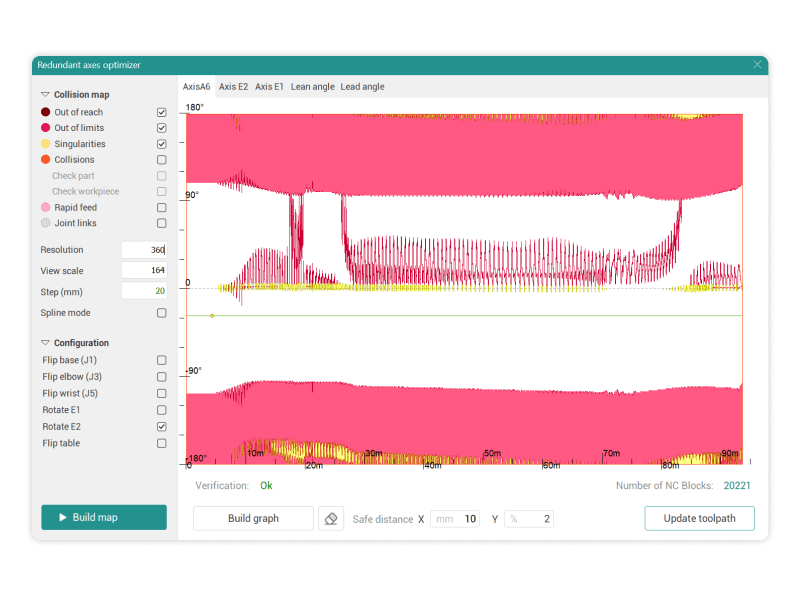 Gain full control over singularities, collisions, reach zone limits, and redundant degree of freedom provided by 6th axis using a dedicated and powerful tool: the robot axis map
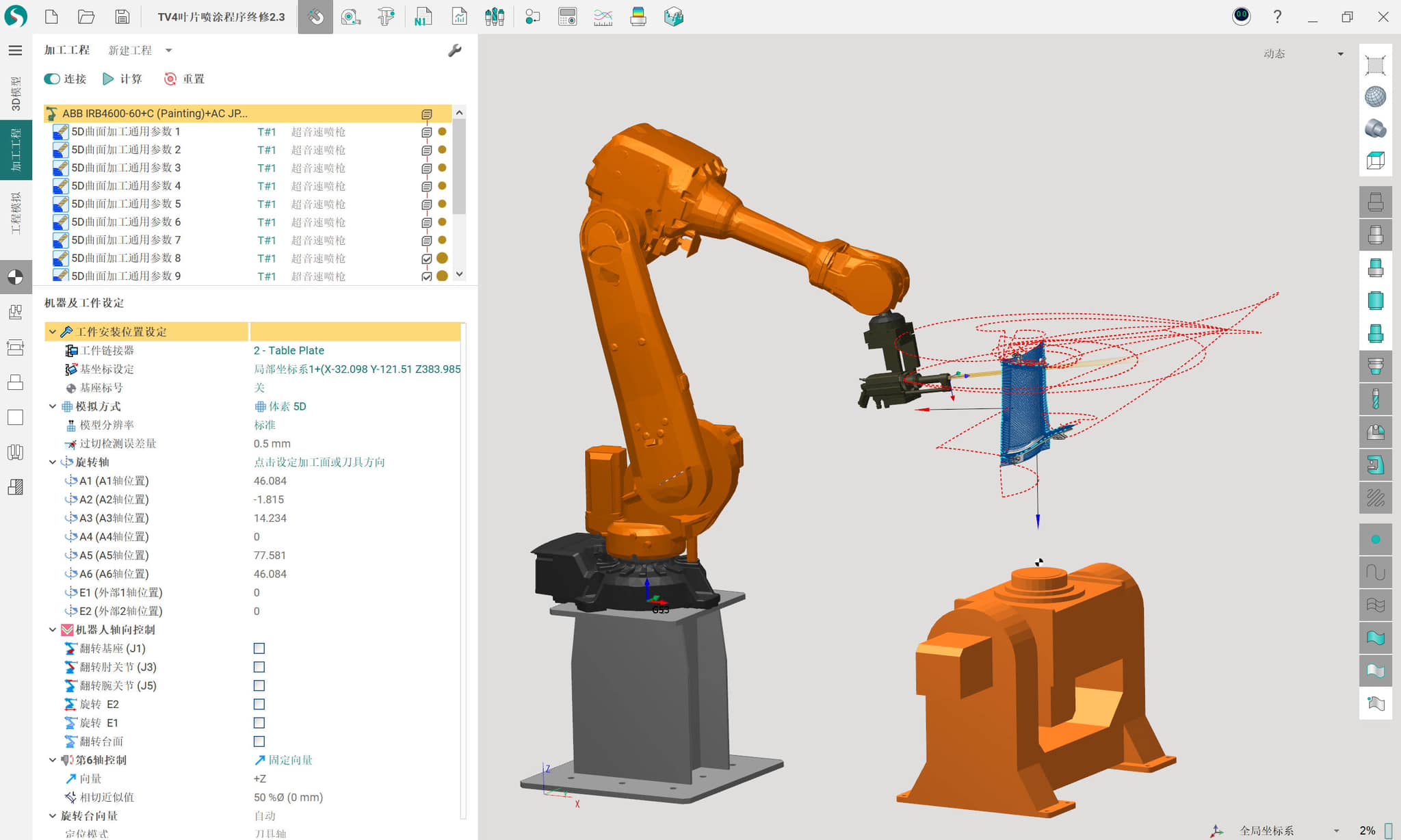
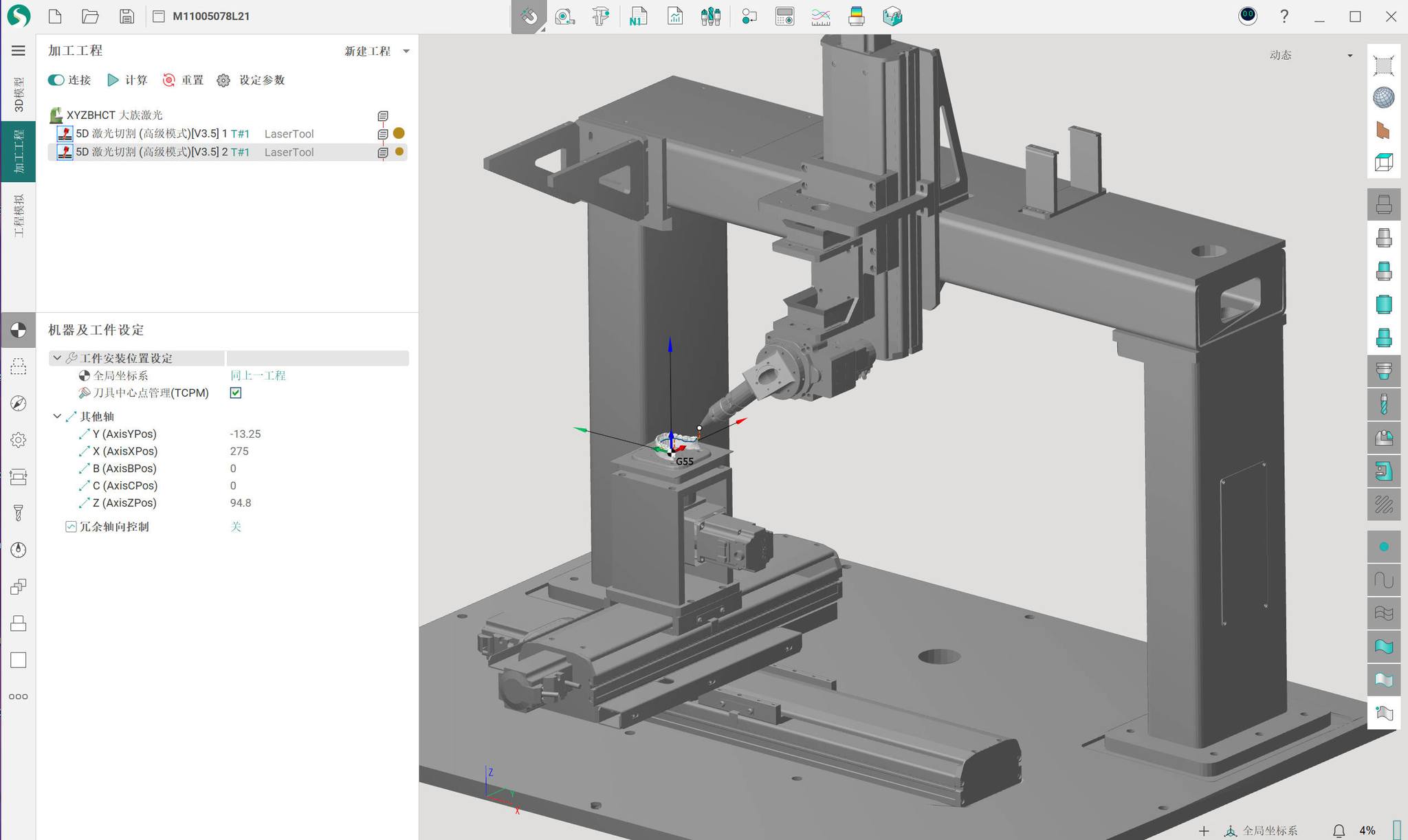
Gain full control over singularities, collisions, reach zone limits, and redundant degree of freedom provided by 6th axis using a dedicated and powerful tool: the robot axis map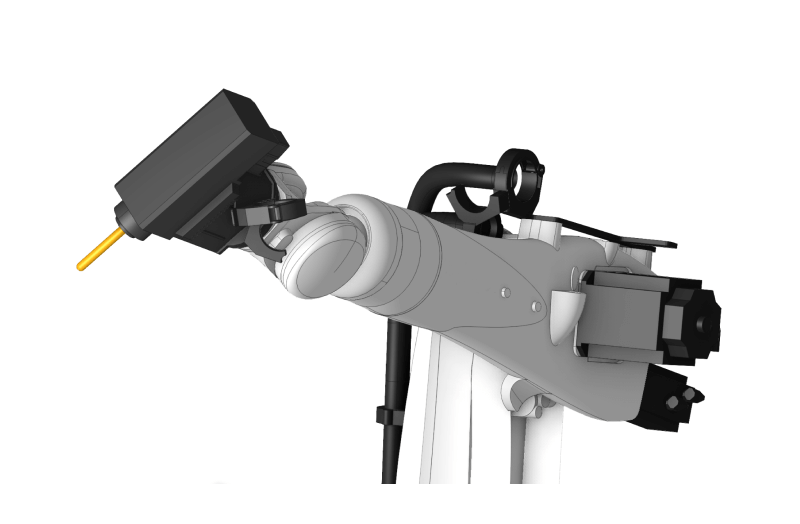 SprutCAM X Robot is machine aware CAD/CAM platform. This means that toolpath calculation is performed taking into an account machine kinematics and limitations. So machine digital twin is used for toolpath calculation and simulation after that
SprutCAM X Robot is machine aware CAD/CAM platform. This means that toolpath calculation is performed taking into an account machine kinematics and limitations. So machine digital twin is used for toolpath calculation and simulation after that
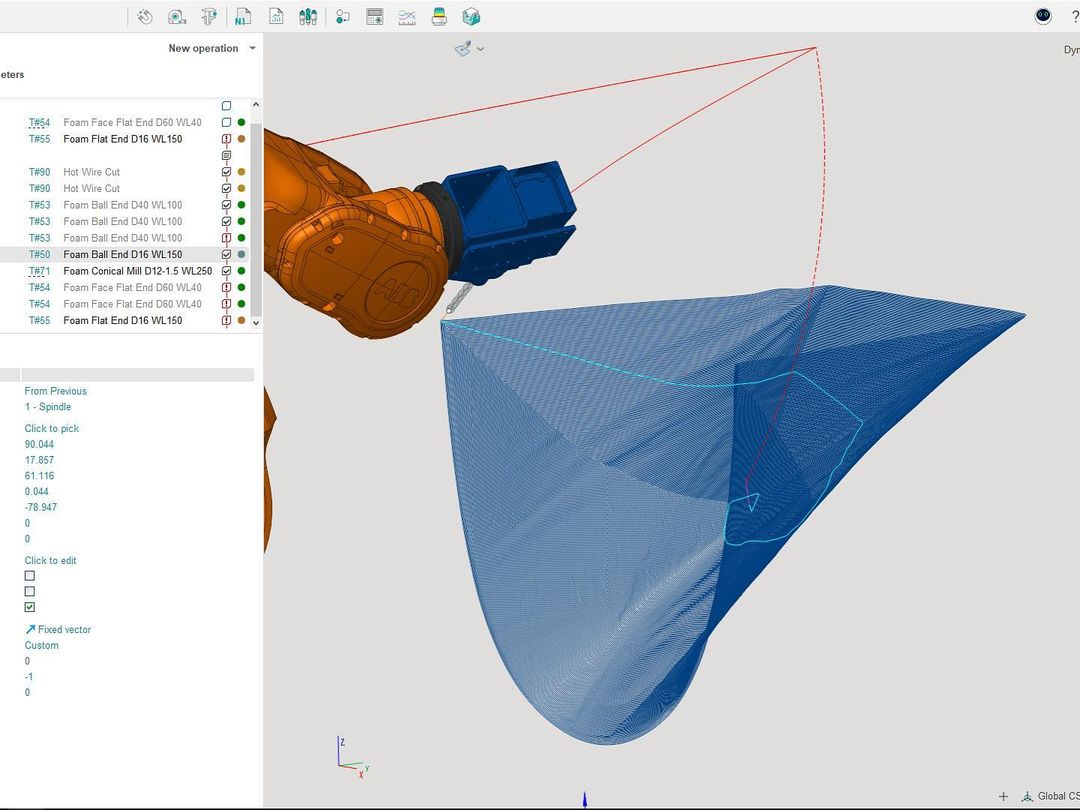
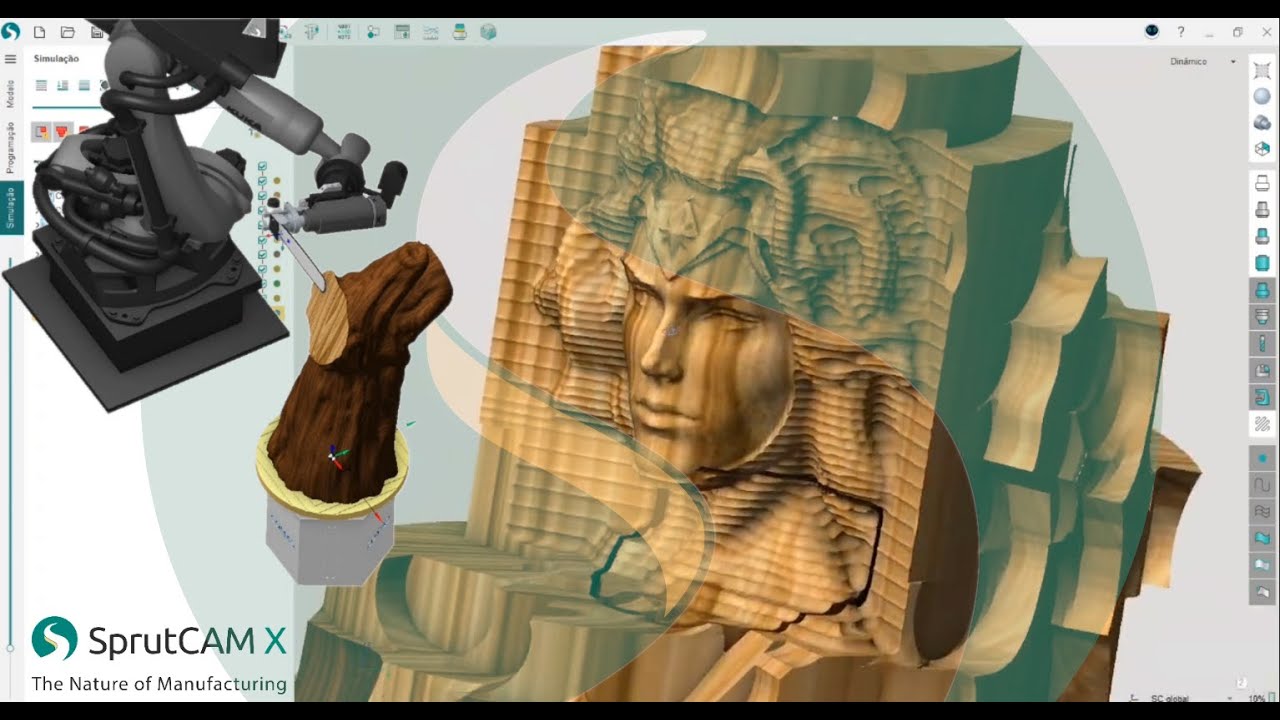
 Precise and smooth simulation of workpiece evolution through the machining process. Either for machining or for additive processes
Precise and smooth simulation of workpiece evolution through the machining process. Either for machining or for additive processes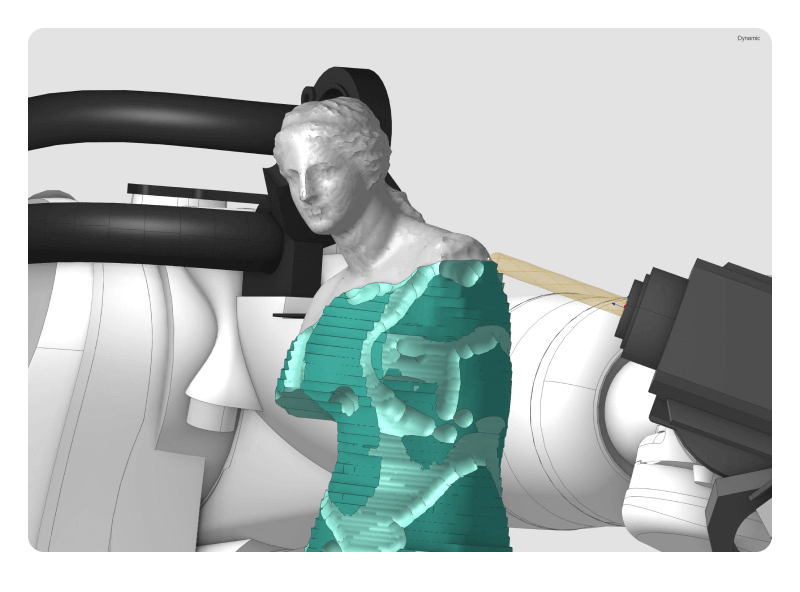 The main working area. Here are machine digital twin, part, workpiece, tools are shown. SprutCAM X Robot shows the interactive elements and simulation in this area
The main working area. Here are machine digital twin, part, workpiece, tools are shown. SprutCAM X Robot shows the interactive elements and simulation in this areaGo beyond
traditional robot simulation software
SprutCAM X is an all-in-one solution for offline
programming that includes:




Offline robot programming workflow







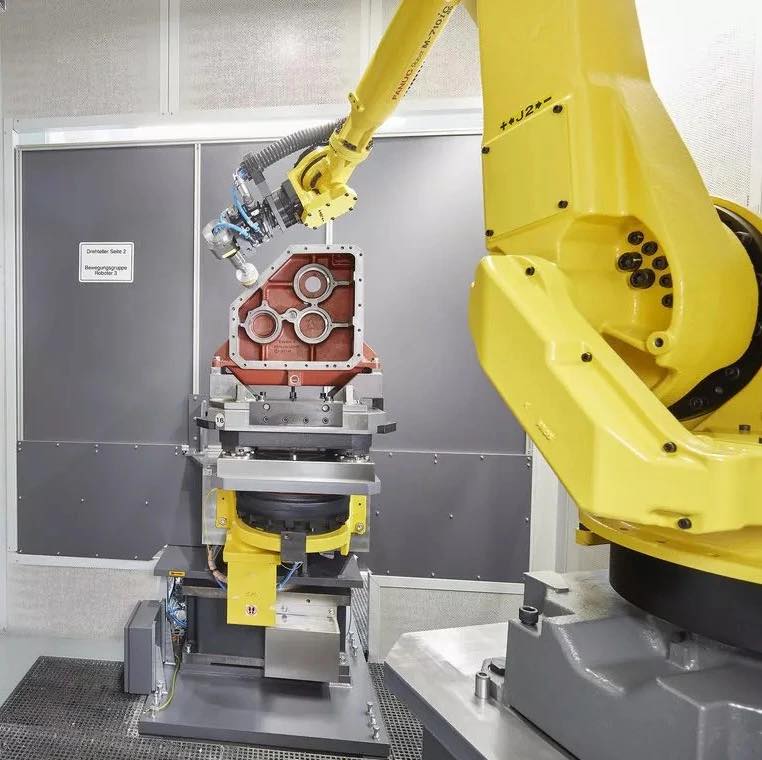
Supported machinery






Applications
Take advantage of offline robot programming:
Go beyond traditional simple applications such as pick-and-place.
Discover new possibilities with enhanced milling, multiaxis cutting, additive and hybrid manufacturing technologies.








Technology highlight:
additive and hybrid
Cutting‑edge and in‑demand technologies for additive and hybrid manufacturing using robots
Applications
Take advantage of offline robot programming:
Go beyond traditional simple applications such as pick-and-place.
 3—5D milling with redundant axes support
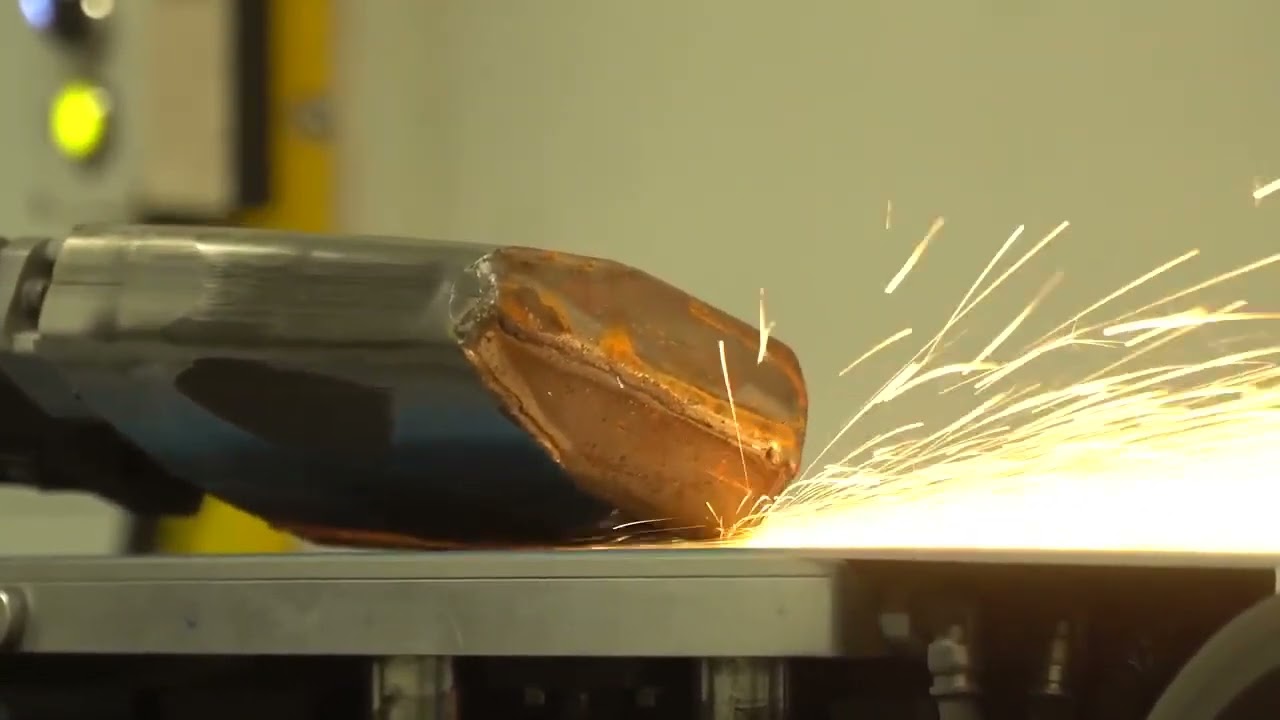
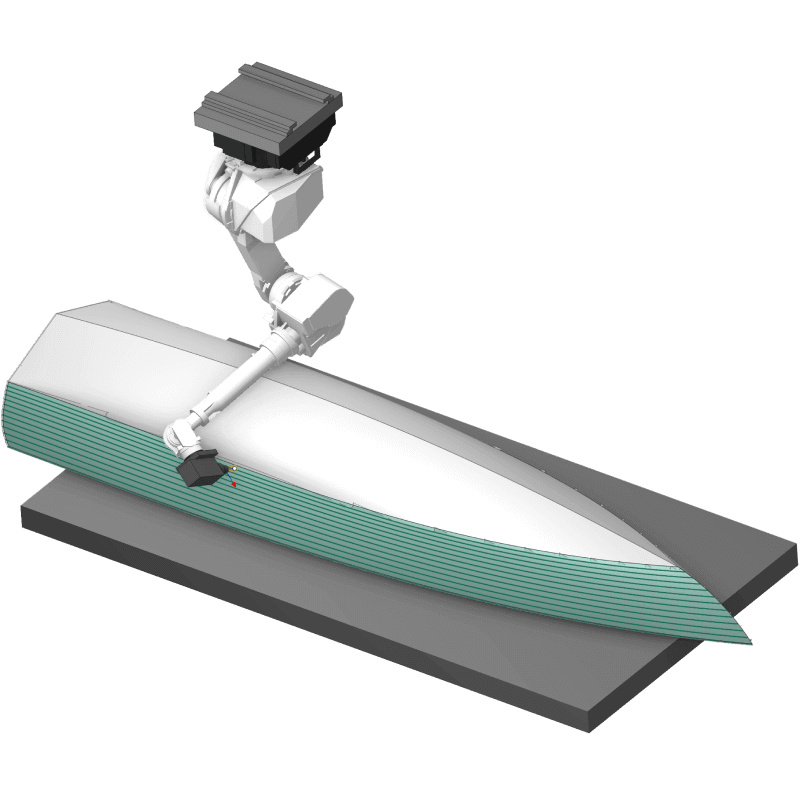
3—5D milling with redundant axes support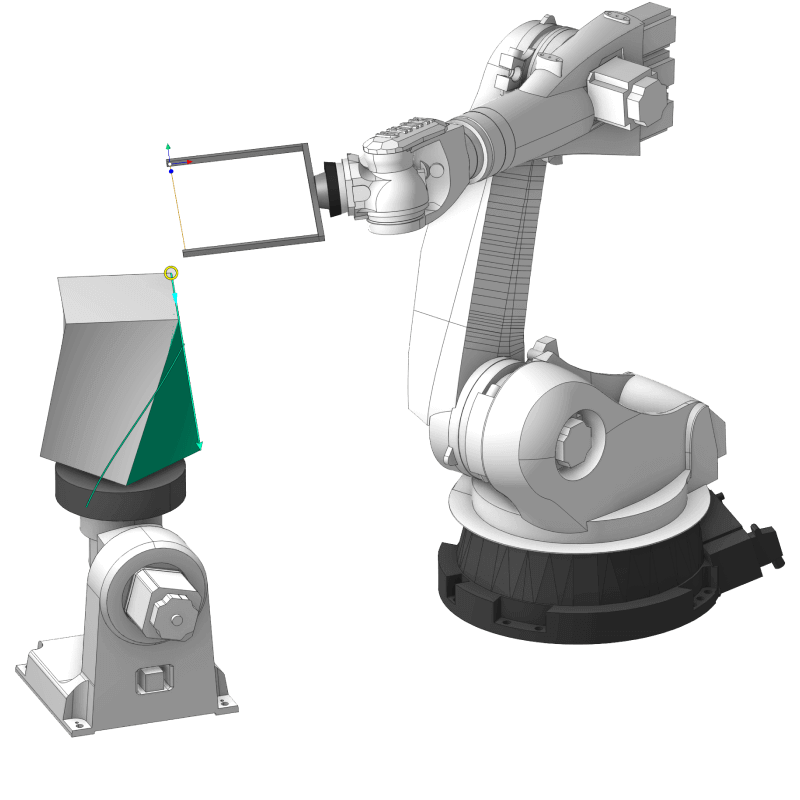 Miltiaxis cutting with precise tool vector control
Miltiaxis cutting with precise tool vector control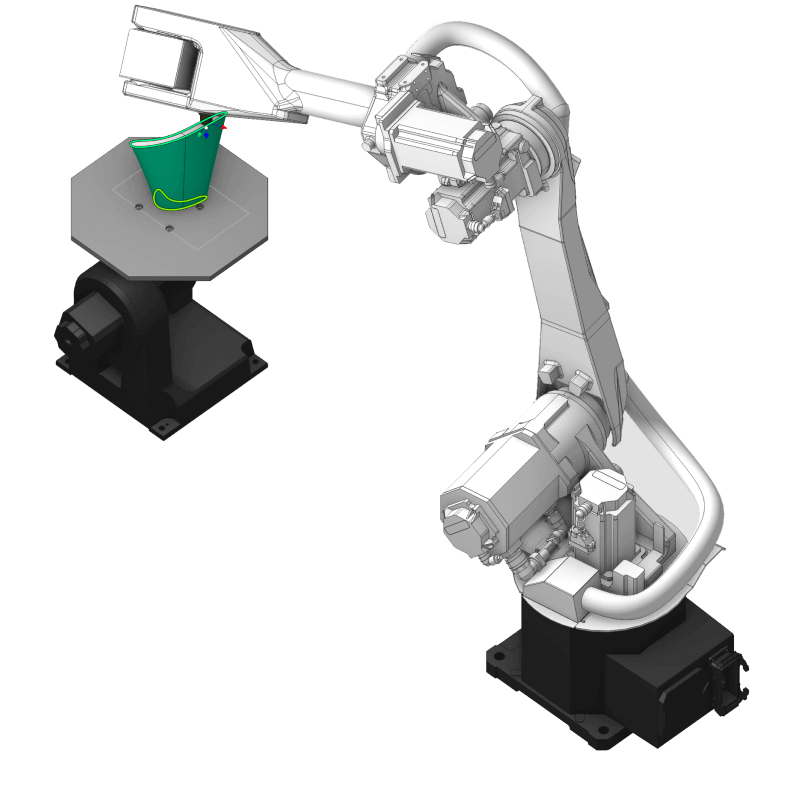 3—5D cladding with advanced layer thickness control
3—5D cladding with advanced layer thickness control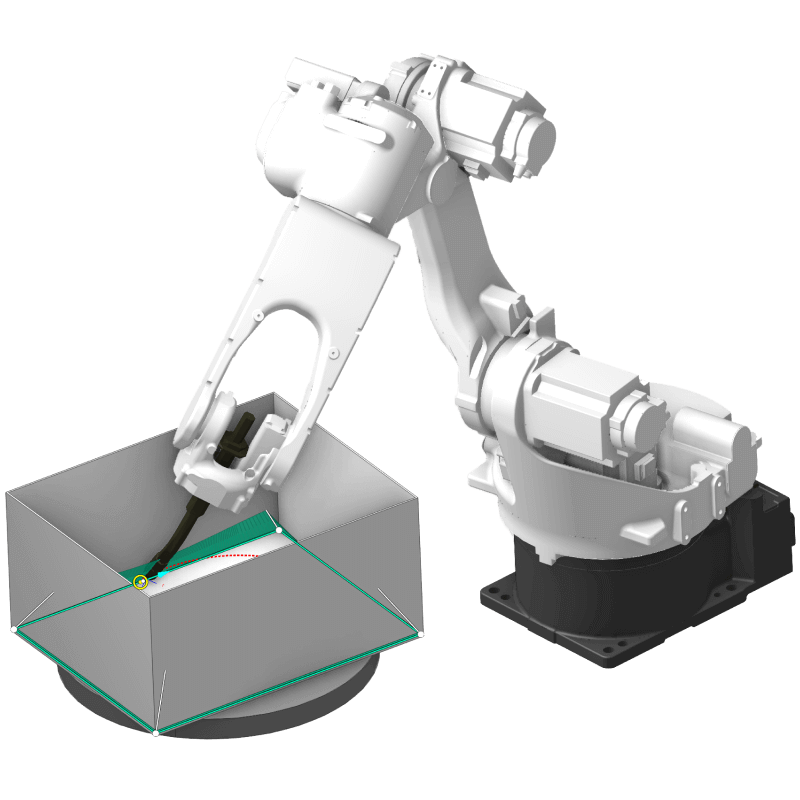 Simple easy-to-use solution for welding programming
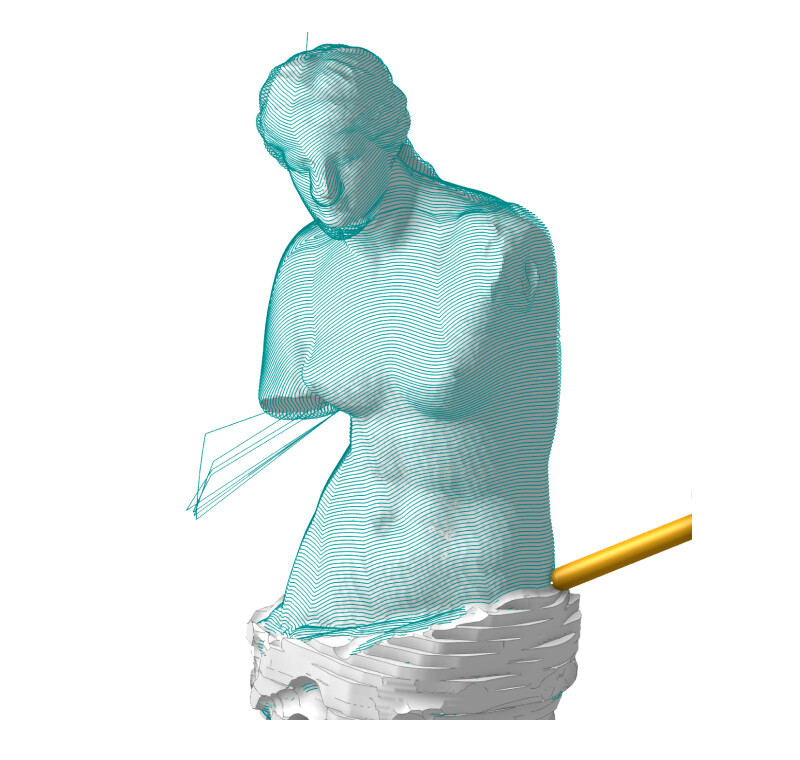
Simple easy-to-use solution for welding programming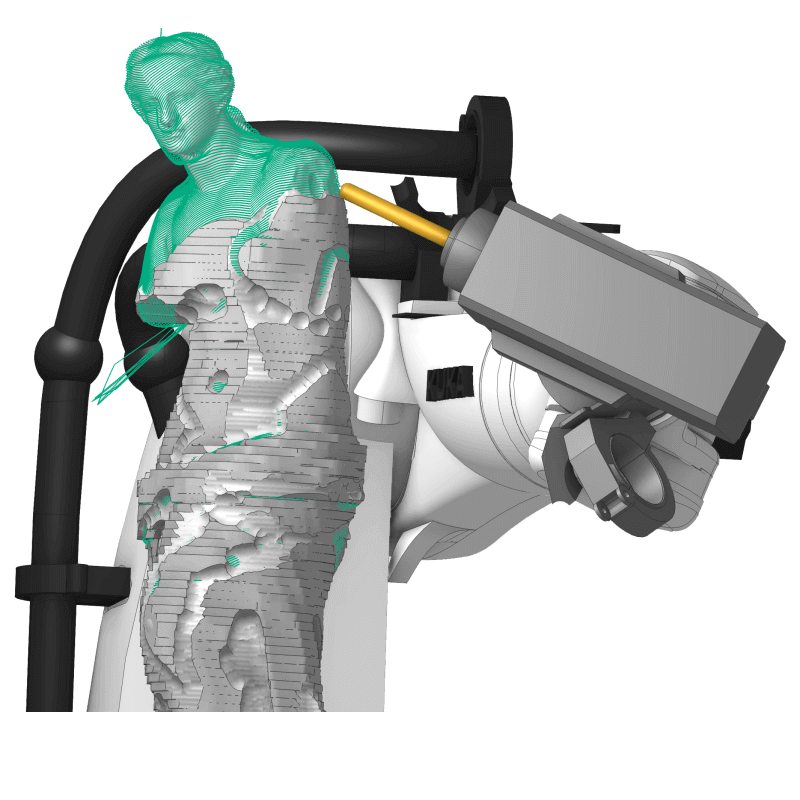 Stone roughing, disk tool, advanced 5D finishing for mesh models
Stone roughing, disk tool, advanced 5D finishing for mesh models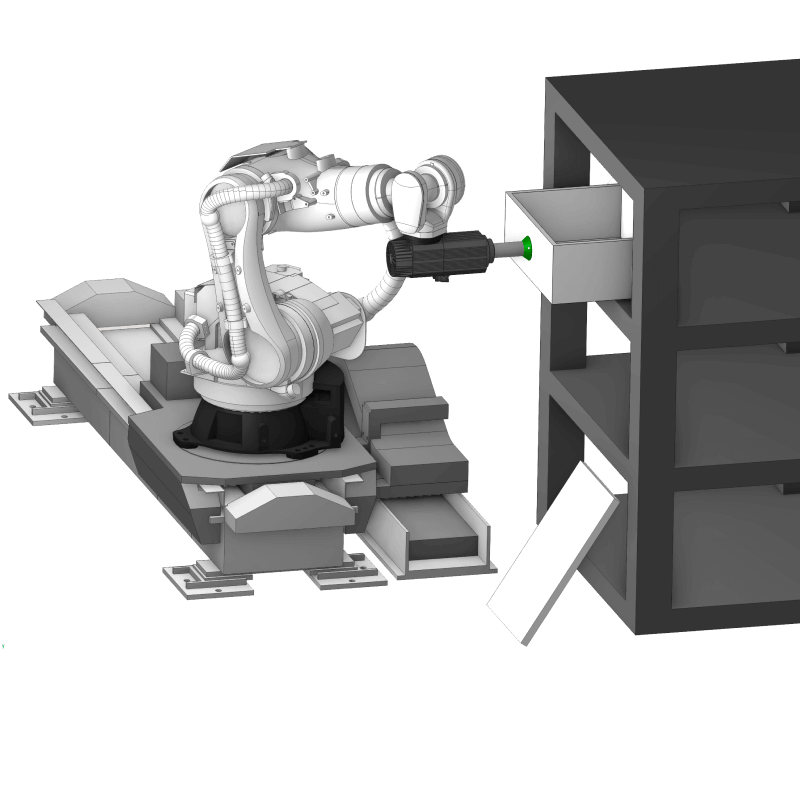 Collision-free automatic pick-and-place
Collision-free automatic pick-and-place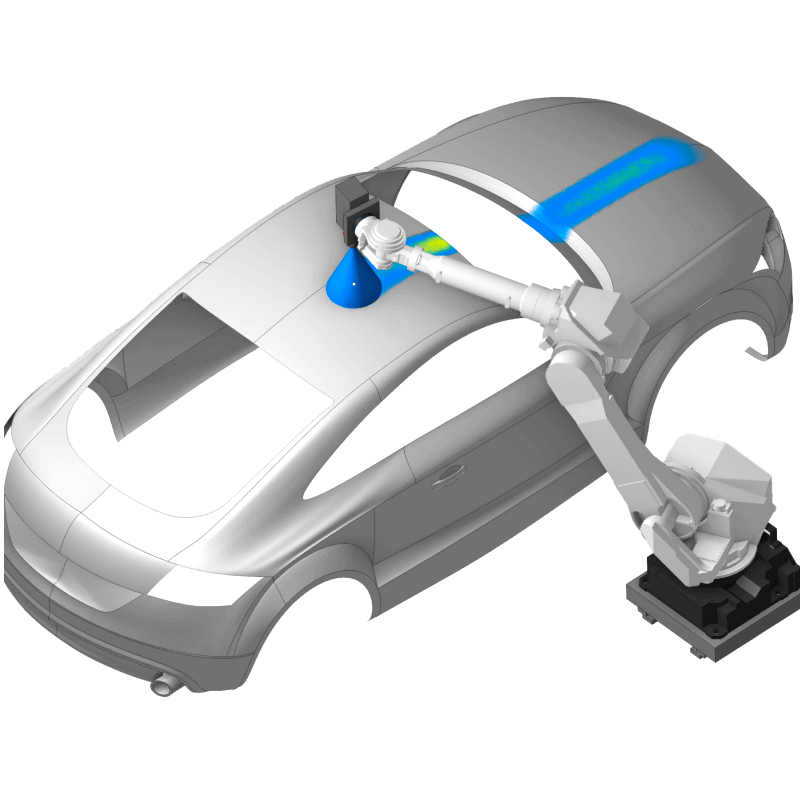 Simulate and test your painting on your PC
Simulate and test your painting on your PC Tool-to-part and part-to-tool supported
Tool-to-part and part-to-tool supported