
Robot collision control by KUKA KR60
 maio 26, 2021
maio 26, 2021

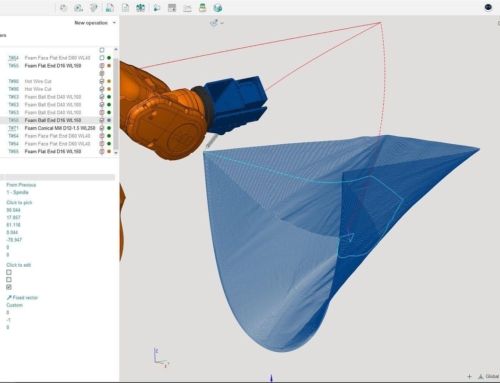
Robot editing with complex collision control.
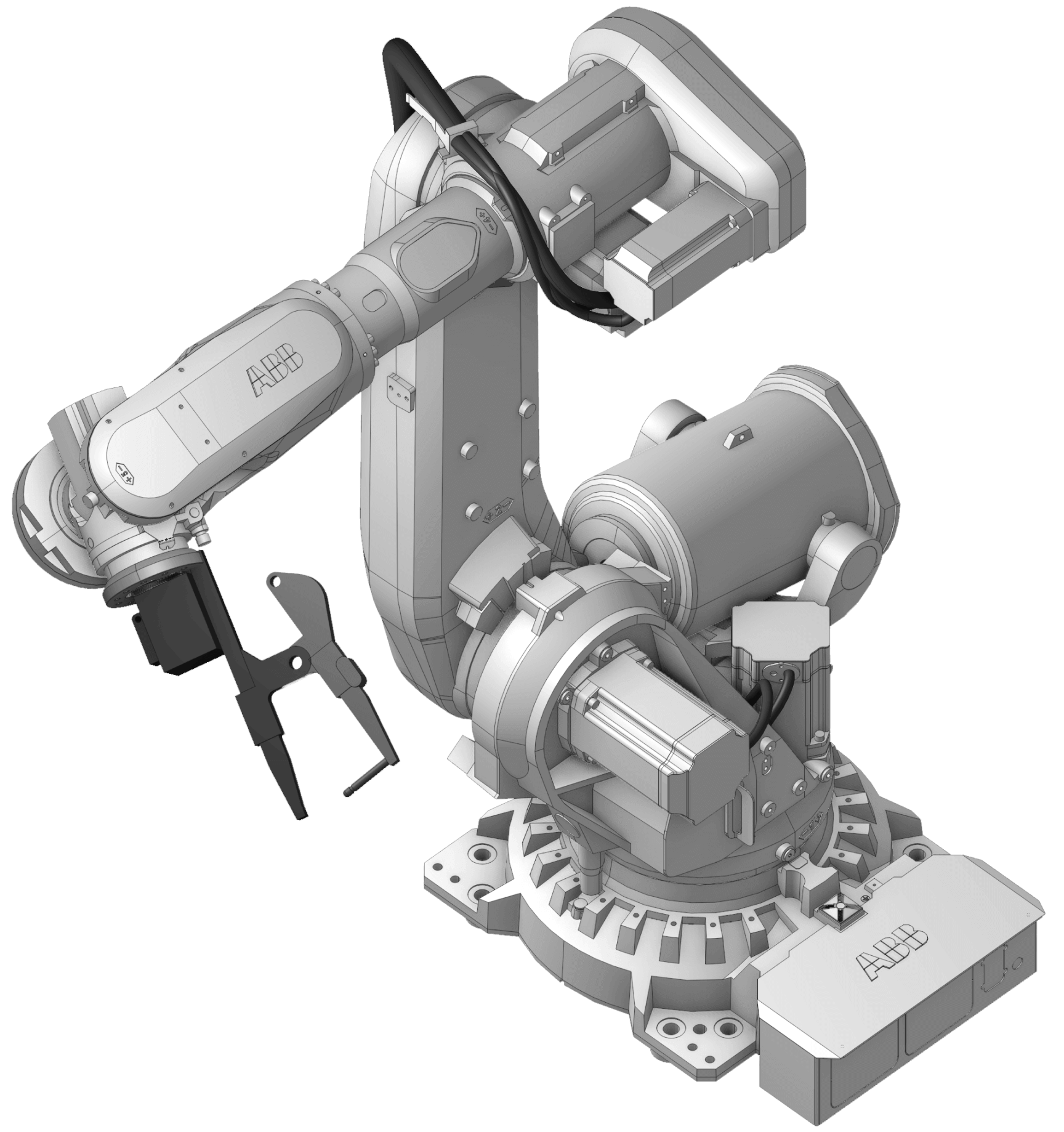
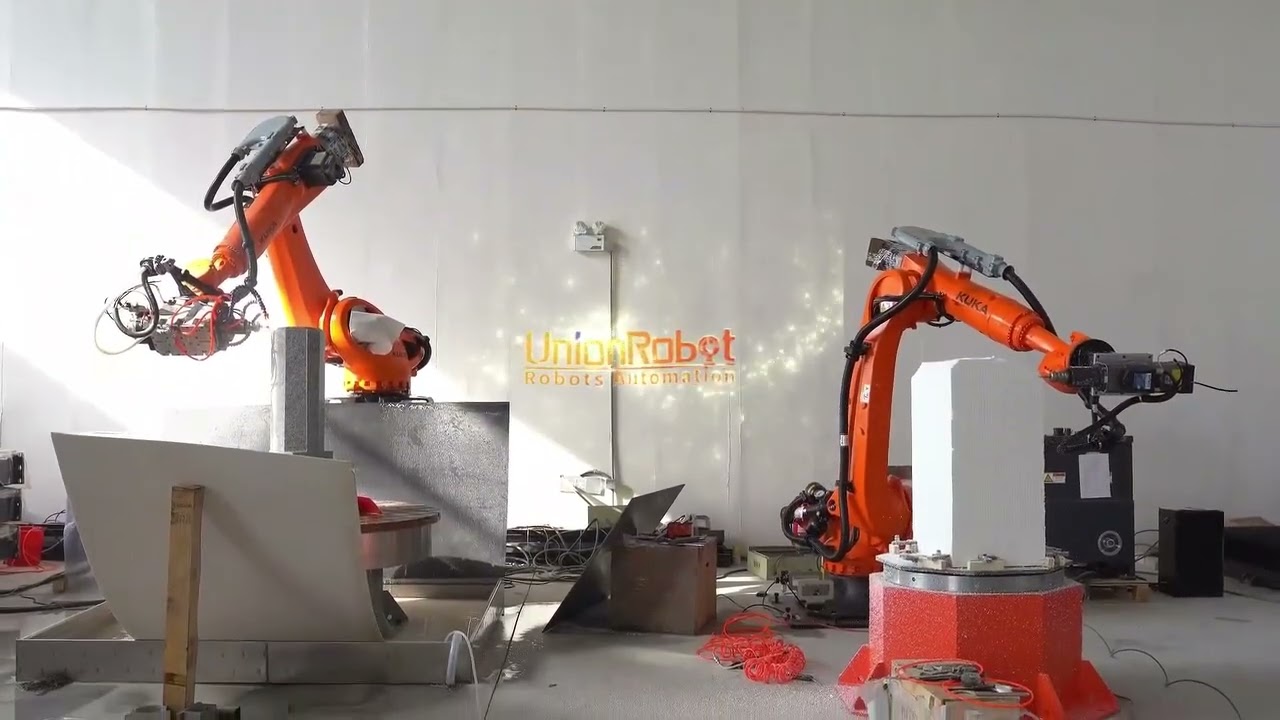
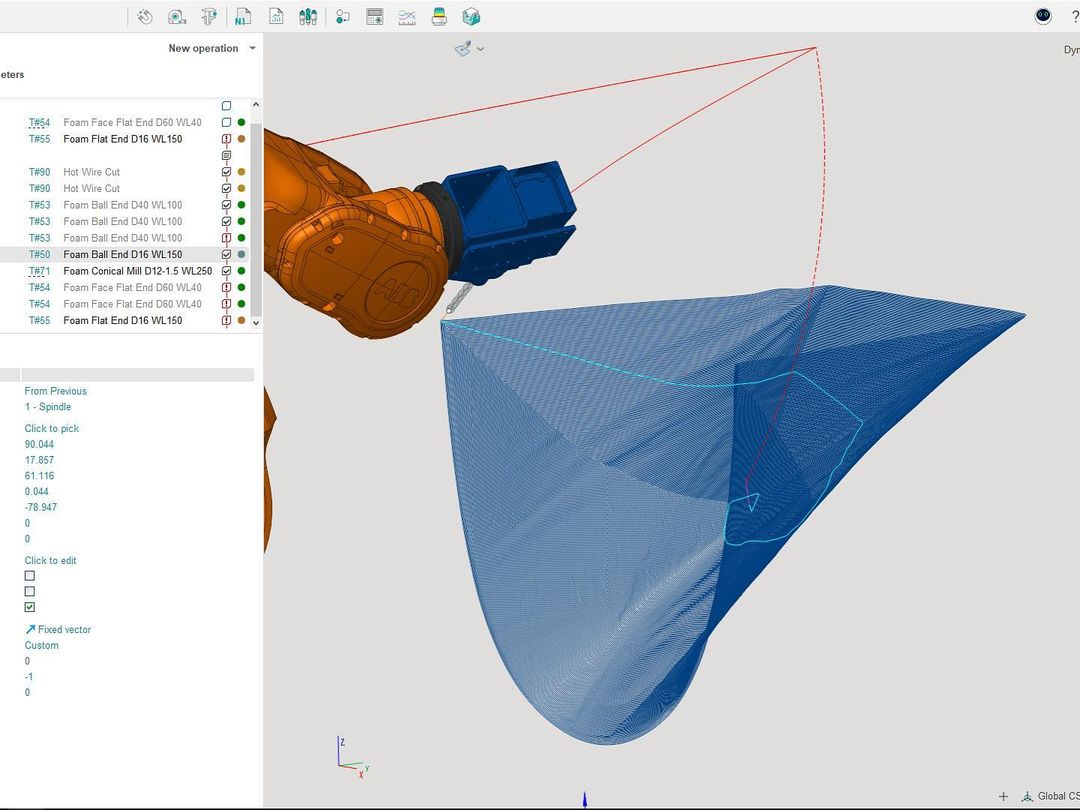
In the picture, you can see a Kuka KR60 with a milling spindle. A hemisphere is being milled from inside.
The challenge is to control the routes so that during the complex
Processing no collisions arise.
In Sprutcam we can easily do this via our axle plan. In the axle plan, we can use a graphic representation of the robot over the tooltip to the surface or correct.
This method can also be used on 5-axis milling machines.
This project is created by our German reseller cnc-technik.de
Find out more about SprutCAM Robot
Compartilhe esta história
Publicações relacionadas






Subscribe
Please login to comment
0 Comments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}