오프라인
프로그래밍(OLP)
SprutCAM X 로봇으로
오프라인
프로그래밍(OLP)
SprutCAM X 로봇으로
로봇을 프로그래밍하는 자연스럽고 쉽고 편리한 방법을 SprutCAM X Robot이 제공한다는 사실을 알고 계셨나요?

로봇을 프로그래밍하는 방법에는 오프라인과 온라인의 두 가지 주요 방법이 있습니다.

OLP 사용의 주요 이점






오프라인 프로그래밍(OLP)
특정 로봇의 디지털 모델에서 가공을 시뮬레이션할 수 있는 특수 소프트웨어를 사용하여 별도의 PC에서 수행됩니다.
디지털 트윈 기술을 사용하면 외부 3D 설계 시스템에서 다음 실행 프로그램을 개발하는 동안 제조 공정을 중단하지 않고 생산 현장에서 실제 로봇을 계속 사용할 수 있습니다.
OLP를 사용하면 로봇에서 새로운 처리 프로그램을 단 몇 시간 만에 실행할 수 있으며, 실제 생산 조건에서 로봇을 설정하는 데만 몇 시간이 걸립니다.

OLP 사용의 주요 이점:






스프루트캠 X 로봇은 편리하고 자연스러운 로봇 프로그래밍 환경을 제공합니다,
엔지니어와 로봇, 도구, 제품의 상호작용이 가능한 한 현실에 가깝게 구현됩니다.
오프라인 프로그래밍, 시뮬레이션 및 코드 생성을 원활하게 통합하여 빠르고 오류 없는 산업용 로봇 프로그램을 제공합니다.
일부 로봇 솔루션은 완전한 작동을 위해 별도의 CAM 시스템을 구매해야 합니다.
SprutCAM X Robot의 경우 다른 것은 필요 없습니다.
SprutCAM X Robot은 완벽하고 원활한 오프라인 산업용 로봇 프로그래밍 솔루션입니다:
- 로봇 셀 제로 코드 디지털 트윈 빌더
- 기술 설정 및 공구 경로 계산
- 시뮬레이션
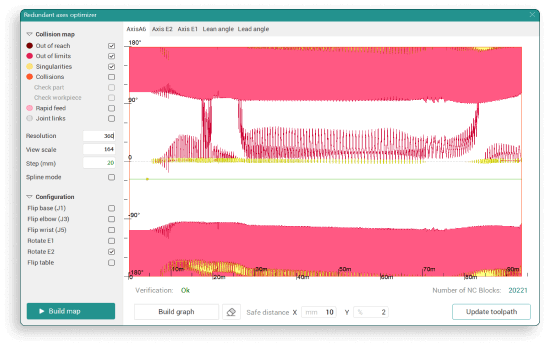
- 특이점 회피 및 충돌 없는 움직임을 위한 로봇 운동학 최적화
- 후처리
- G코드 인증

스프루트캠 X 로봇은 로봇용 CAD/CAM이 필요한 모든 애플리케이션에 이상적인 오프라인 로봇 프로그래밍 및 로봇 시뮬레이션 소프트웨어 솔루션입니다.