
New in SprutCAM X and SprutCAM X Robot 17.0.17 release
 Januar 1, 2025
Januar 1, 2025
SprutCAM X and SprutCAM X Robot update 17.0.17 has been released.
This update introduces 70 changes containing bug fixes and workflow improvements.
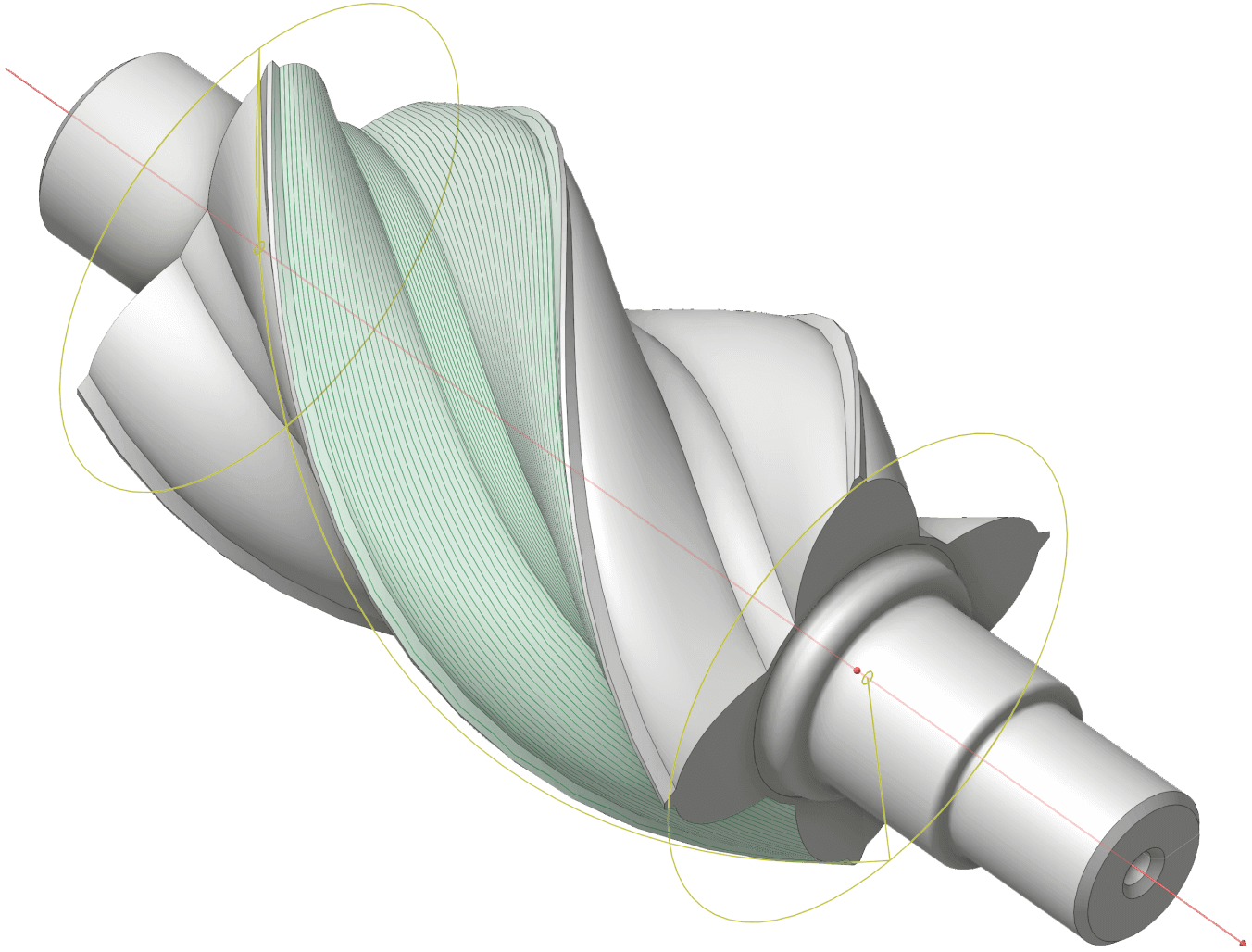
“Frog Jump”

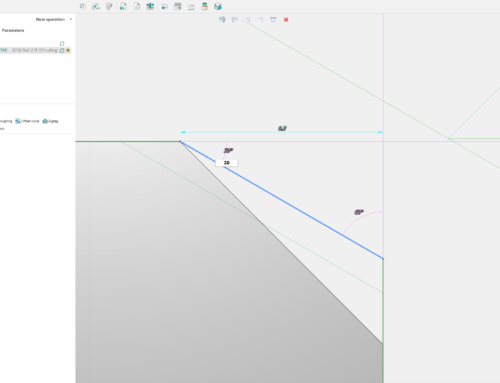
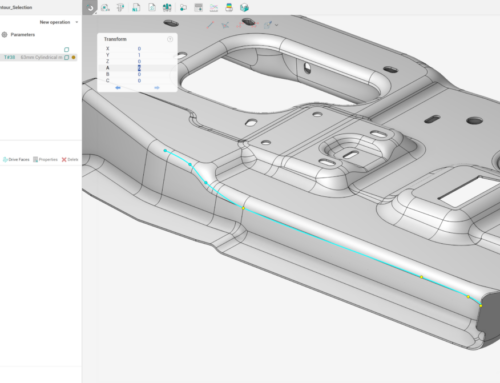
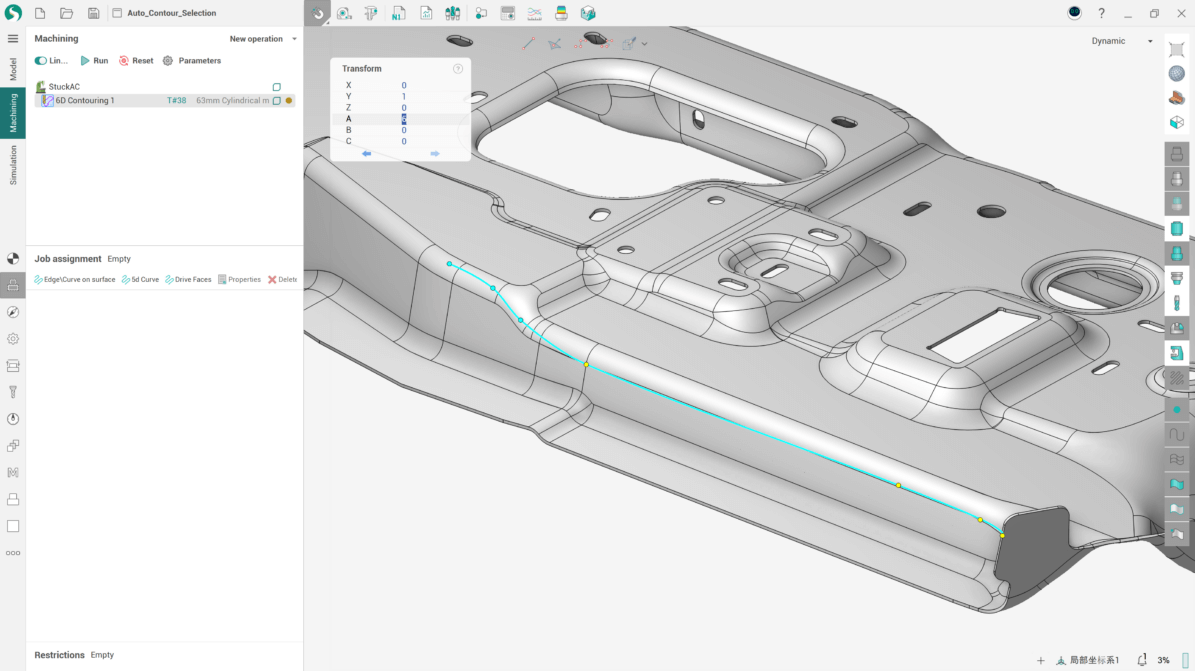
The Vertical Approach Radius parameter has been added to the 6D contour operation

This option, in combination with the Linking radius parameter, extends the connection zone, allowing you to perform the “Frog Jump” transition.
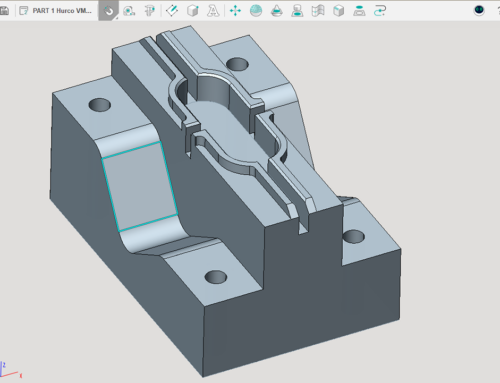
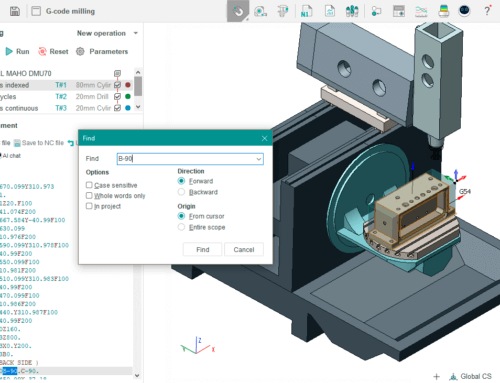
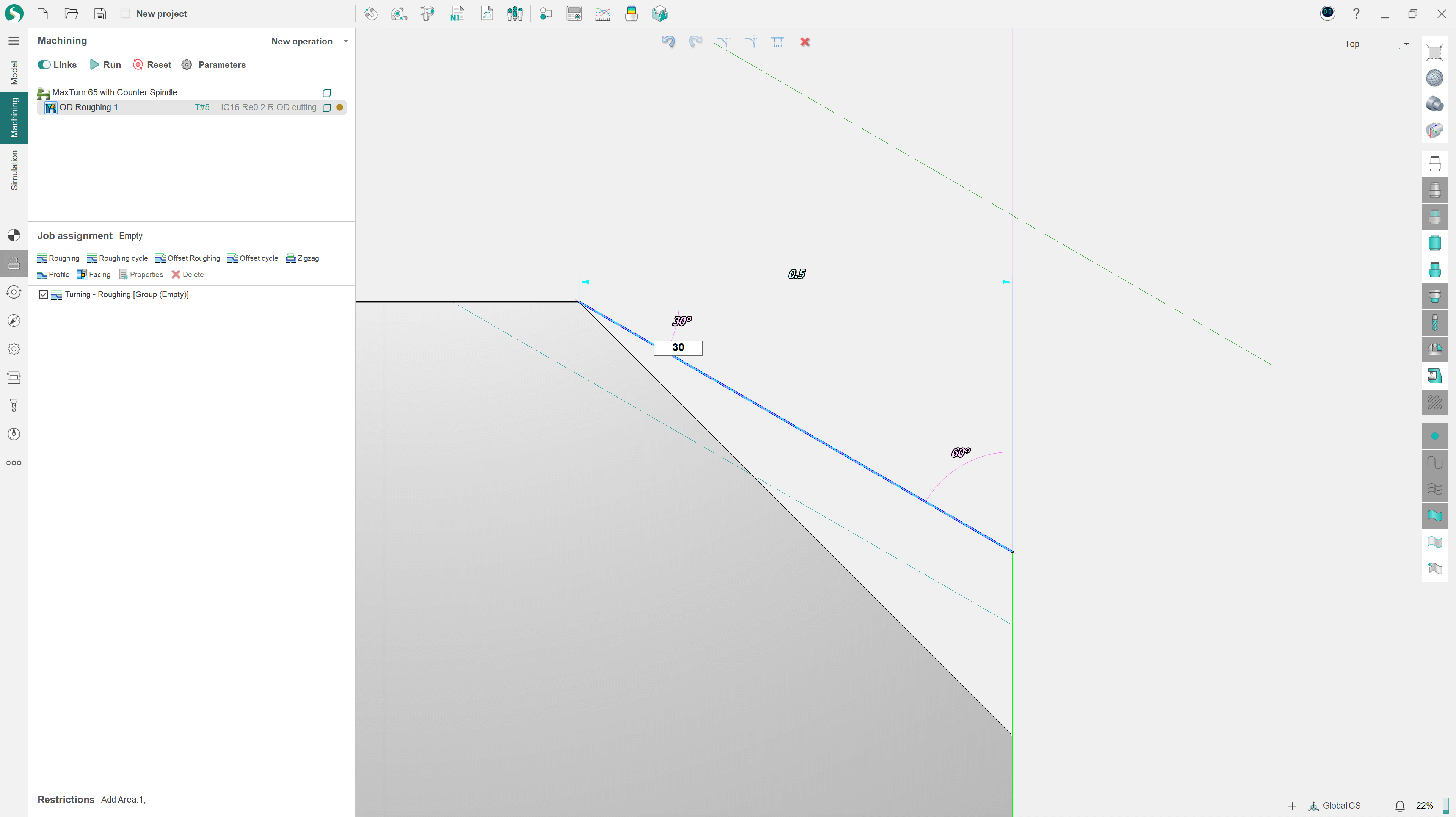
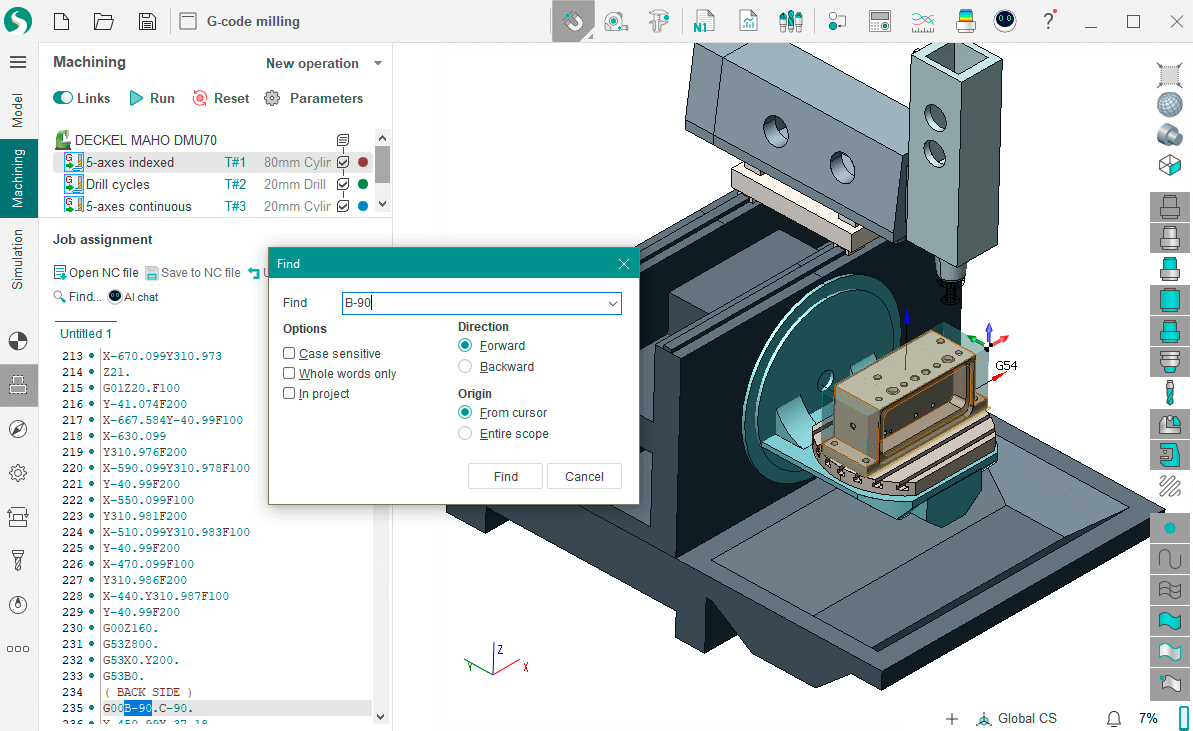
New approach/return rules by machining type

The approach and return rules for multi-axis turning and milling machining centers are now specified for specific machining types.

The rules are defined in the Sub-machine section.
What we made more convenient:
- Updated smart hints for operations and parameters
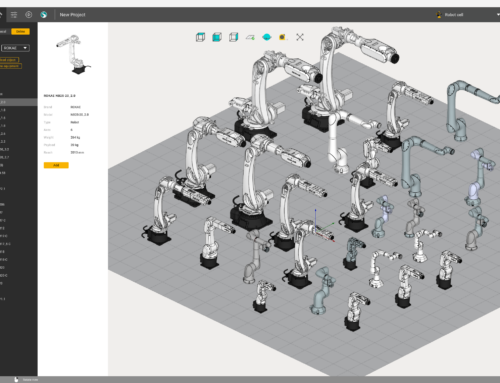
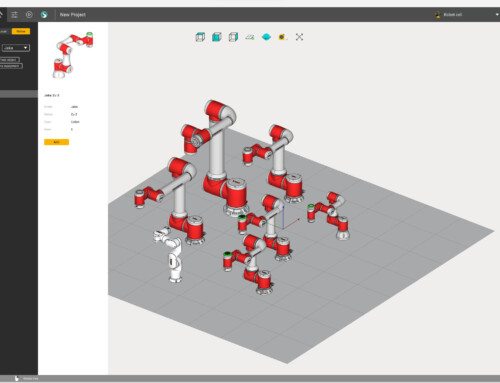
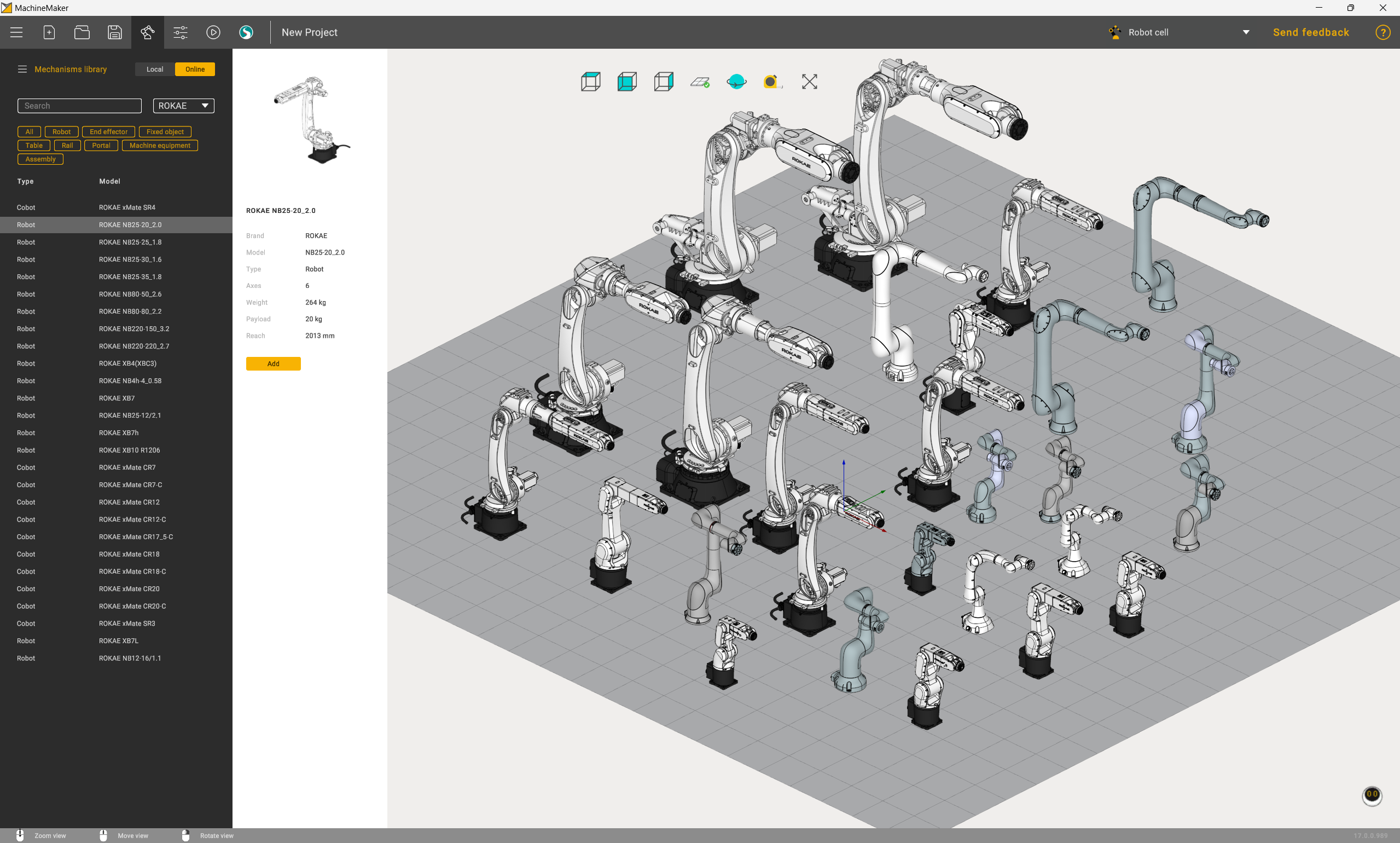
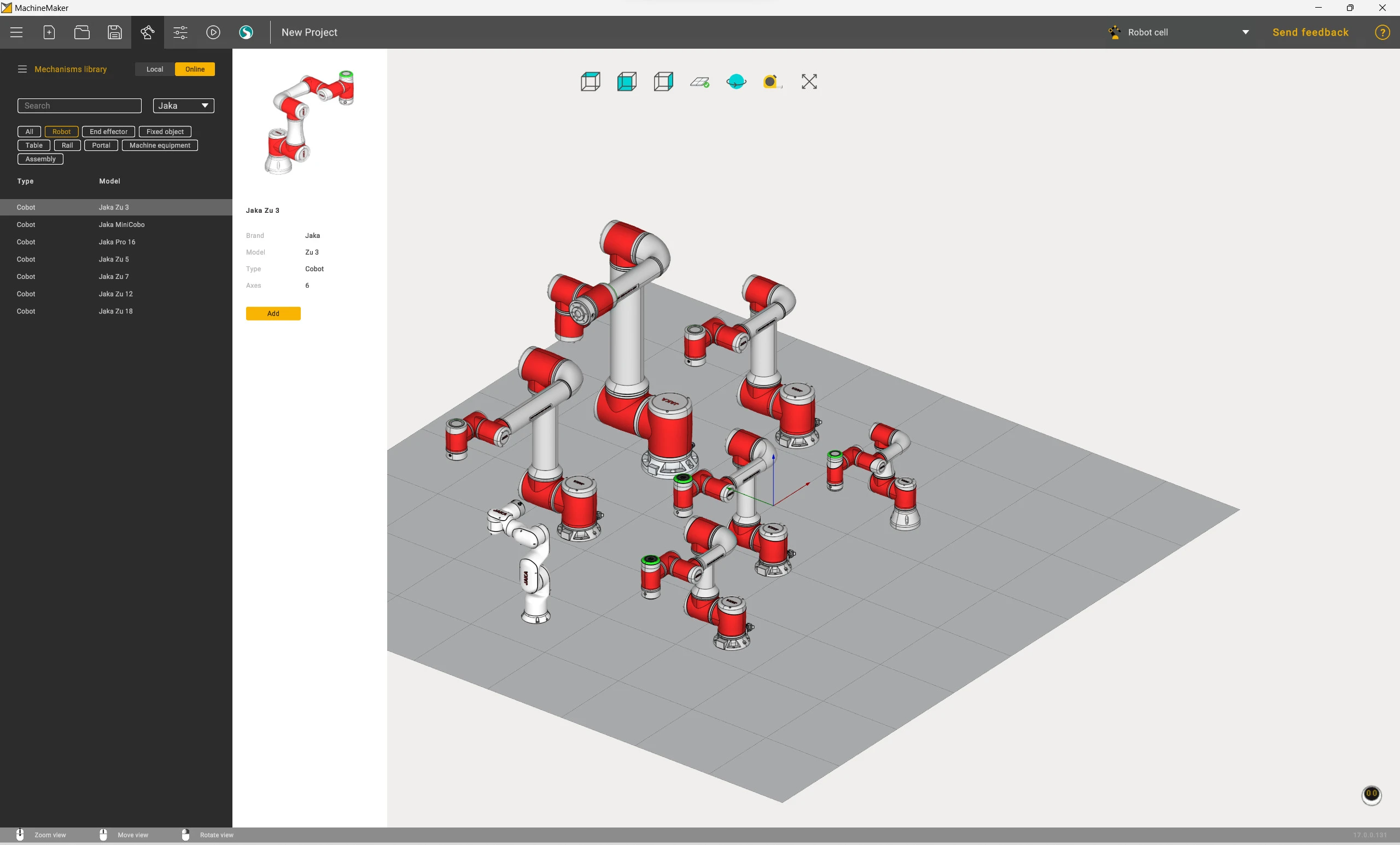
- Added new kinematics to the Flexible Heavy-Duty Robot in the Machine Maker application
Existing SprutCAM X and SprutCAM X Robot users with an active software maintenance contract (SMC) have been notified about the new release and can easily upgrade to benefit from these enhancements. Users who have not received a notification are encouraged to contact their nearest SprutCAM X Reseller for assistance or visit SprutCAM Tech contact page for more information.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}